W dzisiejszych czasach bardzo ważna jest optymalizacja prac, czyli uzyskanie produktu z wymaganą dokładnością przy możliwie jak najmniejszym nakładzie finansowym oraz czasowym. Dlatego też, jednym z najważniejszych aspektów z jakim zmaga się każdy geodeta jest dobór odpowiedniej technologii pomiarowej dla danego zlecenia.
Wraz z rozwojem technologicznym, metodyka wykonywanych prac stała się przyjazna dla użytkownika, bardziej zautomatyzowana, szybsza oraz łatwiejsza do wykonania, przy jednoczesnym utrzymaniu odpowiedniego poziomu jakości oraz dokładności. Na rynku pojawiło się wiele nowoczesnych rozwiązań ułatwiających pomiary oraz analizy wykonywane przez geodetę. Takimi technologiami bez wątpienia są naziemny skaning laserowy oraz pomiar fotogrametryczny z wykorzystaniem bezzałogowych statków latających.
W sieci oraz w różnych czasopismach naukowych i branżowych znajduje się wiele informacji na temat możliwości oraz ograniczeń obydwu tych technologii. Zawierają one dokładne analizy dokładności, z których wynika jednoznacznie, że dokładności otrzymane technologiami fotogrametrycznymi są zbliżone do tych, które geodeta otrzymuje podczas pomiaru odbiornikiem GNSS, podczas gdy naziemny skaning laserowy, pod względem dokładności, można śmiało porównać z tradycyjnymi pomiarami z wykorzystaniem tachimetru, dla których każdy milimetr jest kluczowy. Dlatego też, w niniejszym opracowaniu skupiono się przede wszystkim na pokazaniu procesów jakie zostały wykonane danymi metodami, wizualizacji otrzymanych chmur punktów oraz jaki nakład pracy został wykonany podczas pomiarów na terenie Uniwersytetu w Łodzi, bez głębszej analizy dokładności.
Informacje wstępne:
| Wykonawca: | Maciej Wywiał – specjalista ds. wykorzystania BSP w fotogrametrii Kamil Tomiak – inżynier sprzedaży geoinstrumentów |
| Cel: | Analiza porównawcza naziemnego skaningu laserowego z technologią fotogrametryczną UAV |
| Data i miejsce wykonania nalotu: | Wydział Ekonomiczno-Socjologiczny Uniwersytetu Łódzkiego – 03.12.2019 r. |
| Powierzchnia opracowania: | 2 ha |
| Wykorzystany sprzęt: | DJI Phantom 4 RTK, Trimble TX8 |
| Wykorzystane oprogramowanie: | Pix4Dmapper, Trimble RealWorks |
Opis obszaru badań
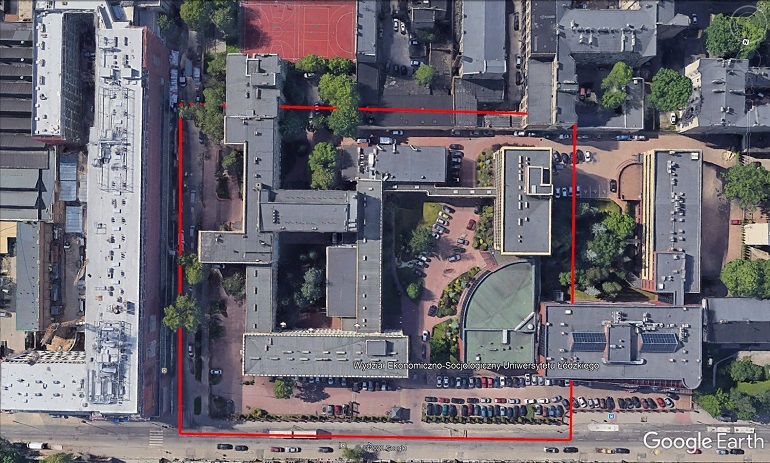
Obszar badań położony jest na terenie należącym do Wydziału Ekonomiczno-Socjologicznego Uniwersytetu Łódzkiego. Teren ma charakterystykę typowo miejską, dzięki czemu analizowane technologie pomiarowe zostały sprawdzone w środowisku, w którym na co dzień bardzo często są prowadzone prace geodezyjne. Na danym obszarze znajdują się budynki niskie (liczba kondygnacji nadziemnych takiego budynku jest mniejsza bądź równa 4) oraz średniowysokie (liczba kondygnacji nadziemnych takiego budynku jest mniejsza niż 9 ale większa niż 4). Dodatkowym utrudnieniem dla obu technologii pomiarowych stanowił fakt, iż budynki znajdujące się na danym obszarze były mocno oszklone oraz fragmentami istniało silne zadrzewienie. Teren objęty testami ma wymiar około 120 m x 150 m i zajmuje powierzchnię niecałych 2 ha (ryc. 1).
Przebieg pomiarów
Naziemny skaning laserowy
Naziemny skaning laserowy z wykorzystaniem skanera Trimble TX8 został przeprowadzony na 62 stanowiskach. Jeden skan, wraz z wykonaniem zdjęć cyfrowych trwał 4 minuty. Tak wysoka liczba stanowisk jest próbą odwzorowania jak najbardziej realistycznie wszystkich elementów obszaru (które momentami były bardzo urozmaicone np. schody, barierki, silne zadrzewienie, wnęki między budynkami itp.). oraz uzyskaniem odpowiedniego pokrycia między stanowiskami, gdyż zdecydowano, że istniejąca infrastruktura znajdująca się na terenie umożliwia późniejszą automatyczną rejestrację skanów na podstawie wspólnych płaszczyzn. Na każdym stanowisku został wykonany przynajmniej jeden skan 360° x 317° na poziomie 2 (odstęp punktów przy 30 m = 11,3 mm). Dodatkowo na każdym stanowisku wykonano zdjęcia panoramiczne wbudowaną kamerą cyfrową, które posłużyły w późniejszym etapie do koloryzowania chmur punktów. Na nielicznych stanowiskach wystąpiły przeszkody terenowe w postaci przejeżdżających aut lub przechodzących ludzi, czego skutkiem była konieczność wykonania kilku skanów uzupełniających. Cały pomiar został zaplanowany tak, aby zoptymalizować czas pracy względem dokładności oraz potrzeb, dzięki czemu późniejsza analiza czasowa obu metod pomiarowych była jak najbardziej wiarygodna.
Metoda fotogrametryczna z wykorzystaniem BSP
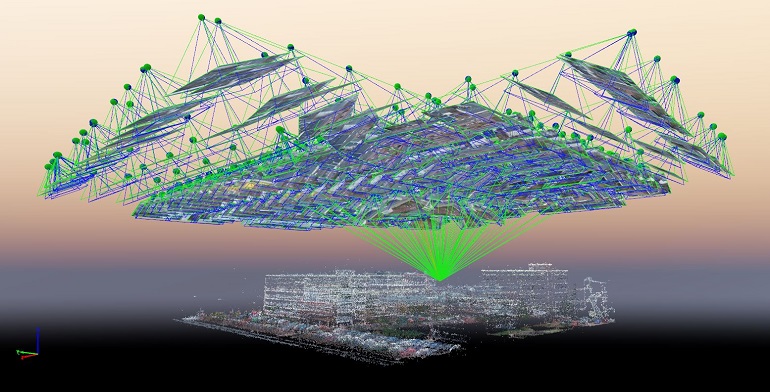
Nalot fotogrametryczny był przeprowadzony przy pomocy Bezzałogowego Statku Powietrznego – DJI Phantom 4 RTK na wysokości 50 m AGL. Z powodu silnego zadrzewienia oraz wysokich elewacji budynków, wybrano nalot „Multi-oriented” (ryc. 2). Ten typ nalotu, polega na podzieleniu misji na 5 „podmisji”. Podczas pierwszej z nich wykonuje się zdjęcia pionowe (kamera „patrzy” w dół, pod kątem 90°) nad całym obszarem, a każda kolejna to już zdjęcia ukośne (wybrano kąt 60°), wykonywane z 4 stron obiektu. Pokrycie podłużne zdjęć wynosiło 80%, a poprzeczne 70%. Cały nalot trwał około 35 minut, czyli wykorzystano 1,5 baterii. Podczas nalotu wykonano 427 zdjęć, których waga wynosi łącznie niecałe 3,5 GB. Dron podczas nalotu korzystał z danych korekcyjnych sieciowych RTN systemu ASG-EUPOS, ze strumienia RTN4G_VRS_RTCM32, odbierając obserwacje z 4 konstelacji satelitów (GPS + GALILEO + GLONASS +BEIDOU).
Opracowanie danych
W celu wykonania wiarygodnej analizy czasowej dla obydwu metod pomiarowych wykorzystano te same komputery do obróbki danych wyposażone w procesor Intel i7 9th, 32 GB pamięci RAM oraz kartę graficzną Nvidia GeForce 1060.
- Naziemny skaning laserowy
Dane uzyskanego z naziemnego skanera TX8 zostały przetworzone w oprogramowaniu Trimble RealWorks w 3 etapach:
- Sampling – po zaimportowaniu projektu z skanera, pierwszą czynność jaką musimy przeprowadzić to próbkowanie (sampling). Ten proces służy przede wszystkim ujednoliceniu rozdzielczości chmury punktów.
- Auto-Rejestracja skanów – proces polegający na połączeniu wszystkich stanowisk w jeden wspólny układ współrzędnych.
- Czyszczenie chmury punktów – ostatnim wykonanym etapem oraz zdecydowanie najbardziej pracochłonnym (wymagającym czynnej pracy operatora) było usunięcie z chmury punktów wszystkich zbędnych elementów (przejeżdżające samochody, przechodzący ludzie), pozbycie się szumów związanych z problemami wiązki lasera z silnie oszklonymi budynkami oraz przeprowadzenie auto-klasyfikacji chmury punktów na warstwy: Budynki – Building, Roślinność – High Vegetation, Grunt – Ground, Pozostałość – Remaining, w celu uzyskania lepszego efektu wizualnego.
- Metoda fotogrametryczna z wykorzystaniem BSP
Dane obrazowe pozyskane z BSP zostały przetworzone w oprogramowaniu Pix4Dmapper w trzech etapach:
- Aerotriangulacja (potocznie „łączenie zdjęć”) wraz z analizą dokładności
Na początku utworzono nowy projekt, zaimportowano zdjęcia, wybrano odpowiednie układy współrzędnych oraz wykonano proces aerotriangulacji – Initial Processing (ryc. 3). Wyrównanie wykonano tylko w oparciu o współrzędne środków rzutów zdjęć. Nie wykorzystano ani jednego fotopunktu. Następnie wykonano kontrolę dokładności na 10 punktach kontrolnych, otrzymując błąd średniokwadratowy (RMSE) ok. 2 cm w osi X i Y oraz stałe przesunięcie wysokościowe modelu (w osi Z) o około 20 cm. O tym, jak się pozbyć przesunięcia, pisaliśmy w artykule o analizach dokładności.
- Dense Matching – generowanie gęstej chmury punktów
Proces ten polega na porównaniu nakładających się ze sobą obrazów w celu odnalezienia cech wspólnych. W rezultacie otrzymujemy gęstą chmurę punktów. Po ustawieniu odpowiednich parametrów przetwarzania, kończy się rola operatora, a pracę zaczynają algorytmy matchingu. W większości przypadków proces ten trwa do kilku godzin. Czas opracowania zależy od ilości zdjęć, wielkości obszaru, wybranych ustawień oraz mocy obliczeniowej komputera.
- Manualna korekta automatycznej klasyfikacji
Program Pix4Dmapper automatycznie wykonuje klasyfikację chmury punktów, między innymi na podstawie wykrycia płaszczyzn, zmian wysokości oraz barw punktów (ryc. 4). Algorytmy sztucznej inteligencji, odpowiedzialne za klasyfikację, cały czas podlegają uczeniu maszynowemu (ang. machine learning), poprawiając swoją efektywność. W zależności od obiektu, poprawność przypisania punktów do odpowiednich klas sięga nawet 90%. W naszym przypadku sprawę utrudniły oszklone elewacje budynków oraz silne zadrzewienie.

Oczywiście z uzyskaniem produktów mogliśmy iść dalej, tworząc model 3D Mesh, numeryczny model porycia terenu (DSM), numeryczny model terenu (DTM) oraz ortofotomozaikę, ale porównaniu poddajemy tylko i wyłącznie chmury punktów.
Uzyskane chmury punktów
Technologia naziemnego skaningu laserowego sprowadza się przede wszystkim do gromadzenia dużej ilości danych przestrzennych w relatywnie krótkim czasie w postaci chmury punktów, cechującej się wysoką szczegółowością oraz dokładnością w odwzorowaniu otoczenia dla potrzeb późniejszych analiz, gdzie dla fotogrametrii niskiego pułapu gęsta chmura punktów jest tak naprawdę jednym z produktów pośrednich. Bardzo dużo osób pytających o technologię UAV skupia się przede wszystkim na produkcje końcowym jakim jest ortofotomapa, nie zdając sobie sprawy, że w trakcie jej tworzenia otrzymujemy tak wartościowy produkt jakim jest gęsta chmura punktów, która ma zastosowanie w:
- tworzeniu modeli 2D/3D,
- kartowaniu map topograficznych oraz NMT/NMPT,
- wykonywaniu przekrojów i rzutów,
- pomiarach objętości hałd oraz określaniu bilansu robót ziemnych,
- dokumentowaniu prac archeologicznych,
- monitorowaniu oraz analizie postępu prac budowlanych,
- inwentaryzacji oraz rekonstrukcji budynków oraz zabytków,
- wizualizacji 3D miast i budynków; wirtualnych wycieczek, tworzeniu filmów, reklam itp.
Dla wszystkich wymienionych przykładów jak i wielu innych zastosowań (możliwości są praktycznie nieograniczone) zarówno chmura punktów uzyskana technologią skanowania 3D jak i ze zdjęć z bezzałogowego statku latającego świetnie się sprawdzi.
Poniżej przedstawiamy chmury punktów uzyskane obiema metodami. Dzięki udostępnionym wizualizacjom (użytkownik może dowolnie przybliżać i obracać obie chmury), możliwe jest ich samodzielne porównanie i wybranie odpowiedniej metody do swoich zleceń.
Chmura z skaningu:
Chmura z nalotu UAV:
Nakład pracy
Bez żadnych wątpliwości jedną z najważniejszych zalet obydwu metod, w porównaniu z metodami wykorzystującymi tachimetr lub odbiornik GNSS, jest oszczędność czasu, w jakim geodeta pozyskuje dane. Ponadto otrzymane dane cechują się nieporównywalnie wyższą rozdzielczością niż w przypadku klasycznych metod pomiaru. Na uwagę zasługuje również fakt, że do uzyskania danych na obszarach o niejednokrotnie dużej powierzchni wystarczy jedna osoba, już w ciągu jednego wyjazdu terenowego.
Z drugiej strony, duża ilość czasu poświęconego na opracowanie danych przenosi się z terenu do biura, a czas wymagany na wygenerowanie potrzebnych produktów zależy przede wszystkim od mocy obliczeniowej naszego komputera.
W tabeli poniżej znajduje się zestawienie czasu potrzebnego na uzyskanie chmury punktów dla badanego obszaru:
Tabela 1. Porównanie nakładu pracy dla obydwu metod
| Czynność | Skanowanie 3D | UAV |
| Prace terenowe | 5h (5 min na każdym stanowisku) | 40 min |
| Prace kameralne | 2,5 h – Sampling
30 min – Auto-Rejestracja skanów 3h – Czyszczenie chmury punktów RAZEM: około 6 h (w tym 3h czynnej pracy operatora) |
45 min – aerotriangulacja
30 min – kontrola dokładności 3 h – generowanie gęstej chmury punktów RAZEM: około 7 h (w tym 1 h czynnej pracy operatora) |
W powyższej tabeli nie został uwzględniony proces zadawania georeferencji chmurze punktów, który niestety wymaga przez użytkownika pomiaru tradycyjnymi metodami geodezyjnymi. W przypadku metody fotogrametrycznej z wykorzystaniem BSP wyposażonego w technologię RTK, wystarczy tak naprawdę pomiar jednego punktu GCP odbiornikiem GNSS. W przypadku skaningu w celu uzyskania odpowiednych dokładności oraz georeferencji należałoby pomierzyć przynajmniej dwa punkty/cele tachimetrem dla danego obszaru, co nie wątpliwie jest bardziej czasochłonne.
Podsumowanie
Analiza wizualna obydwóch chmur punktów wykazała, że dla obiektów poziomych (dróg, trawników, chodników, dachów itp.) chmura z BSP wygenerowana w programie PIX4Dmapper jest lepsza jakościowo oraz bardziej kompletna, niż ta pozyskana metodą skaningu 3D, między innymi przez dużą ilość zaparkowanych aut, czego skutkiem było powstanie martwych pól oraz brakiem informacji na temat dachów budynków.
Jednakże, analizując obiekty pionowe tj. budynki lub małe obiekty infrastruktury np. barierki, słupy itp. chmura uzyskana metodą fotogrametryczną jest obarczona o wiele większymi szumami (np. punkty reprezentujące elewacje budynków) niż ta, uzyskana technologią TLS (z ang. Terrestrial Laser Scanning), co mogłoby utrudnić dalsze analizy.
Dodatkowo rozpatrując sam aspekt wizualny można bardzo łatwo stwierdzić, że wbudowana kamera cyfrowa w skanerze Trimble TX8 o wiele gorzej sprawiła się podczas koloryzowania chmury punktów, niż ta zamontowana na pokładzie Phantoma 4 RTK, czego rezultatem jest otrzymanie mniej wyraźnych tekstur.
Nakład prac terenowych potrzebnych do zgromadzenia niezbędnych danych dla naszego obszaru badań był znacznie większy dla technologii skanowania 3D, niż potrzebny na zrobienie zdjęć z bezzałogowego statku latającego. Nie mniej jednak, produktem bezpośrednim jaki uzyskujemy po wykonaniu skaningu jest gotowa chmura punktów na której praktycznie od razu po przyjściu do biura możemy wykonać wszelakie analizy, a w przypadku fotogrametrii musimy wykonać kilka niezbędnych procesów, po których dopiero uzyskujemy końcowy produkt.
Analizując czas poświęcony na prace terenowe jak i kameralne versus ilość oraz jakość danych przestrzennych uzyskanych prezentowanymi technologiami, można śmiało stwierdzić, że obydwie metody znacznie przewyższają możliwości tradycyjnych technologii pomiarowych w znacznym stopniu ułatwiając geodecie wykonywanie większej ilości zleceń.
Ostatnim aspektem, który w tym artykule nie został poruszony jest oczywiście aspekt dokładnościowy. Naziemny skaning laserowy cechuje się zbliżoną do pomiarów z wykorzystaniem tachimetru dokładnością, dzięki czemu uzyskana chmura punktów umożliwia nam bardzo zaawansowane oraz precyzyjne analizy np. w geodezji inżynieryjnej i przemysłowej, z którymi prawdopodobnie fotogrametria by sobie (jeszcze) nie poradziła. Z drugiej strony, rozpatrując koszt zakupu sprzętu oraz oprogramowania oraz że nie każde zlecenie wymaga od geodety dokładności milimetrowej, nasuwa się myśl: po co od razu do wróbla strzelać z armaty? Między innymi dlatego, fotogrametria z wykorzystaniem BSP świetnie sprawdziłaby się w większości prac wykonywanych przez geodetę jak np. mapa do celów projektowych, bilans robót ziemnych czy wszelakie inwentaryzacje umożliwiając wykonanie większej ilości tego typu zleceń oraz przekazanie inwestorom oprócz suchych map i projektów 2D, również bogaty produkt w postaci chmury punktów lub modelu 3D Mesh, który pozwoli im w łatwy i przyjemny sposób monitorować oraz analizować postępy prac budowlanych. W tabeli poniżej przedstawiamy nasze spostrzeżenia dotyczące obydwu metod oraz porównanie ich do klasycznej geodezji:
Tabela 2. Porównanie metod geodezyjnych
| Dokładność danych | UAV | < | SKANING | ≤ | GEODEZJA KLASYCZNA |
| Szczegółowość | GEODEZJA KLASYCZNA | < | UAV | ≤ | SKANING |
| Szybkość pomiaru | GEODEZJA KLASYCZNA | < | SKANING | ≤ | UAV |
| Szybkość opracowania | UAV | ≤ | SKANING | ≤ | GEODEZJA KLASYCZNA |
| Różnorodność produktów/opracowań | GEODEZJA KLASYCZNA | < | SKANING | ≤ | UAV |
| Zależność od warunków pogodowych | UAV | < | GEODEZJA KLASYCZNA | ≤ | SKANING |
| Koszt sprzętu/oprogramowania | GEODEZJA KLASYCZNA | ≤ | UAV | < | SKANING |
Podsumowując, obie technologie świetnie poradziły sobie w gromadzeniu danych przestrzennych w postaci gęstej chmury punktów odzwierciedlając teren Wydziału Ekonomiczno-Socjologicznego Uniwersytetu Łódzkiego bardzo realistycznie. Jednakże, uwzględniając kryteria: cena vs czas vs dokładność podczas doboru odpowiedniej technologii pomiarowej na potrzebę zleceń, technologia fotogrametryczna z wykorzystaniem BSP wygrywa z naziemnym skaningiem laserowym stosunkiem 2:1.
O NaviGate
NaviGate to znana marka dostarczająca wysokiej jakości rozwiązania pomiarowe Spectra Geospatial dla geodezji, leśnictwa, GIS i budownictwa. W ofercie firmy odbiorniki GNSS, tachimetry manualne i zrobotyzowane, kontrolery, a także szeroki wybór oprogramowania terenowego i biurowego.
Jeżeli chodzi o bezzałogowe statki powietrzne, firma NaviGate jest autoryzowanym dystrybutorem takich marek jak DJI Enterprise, Atmos UAV oraz FlyTech. Oferujemy również kamery wielospektralne MicaSense. Kiedy myślimy o zastosowaniu dronów w geodezji, leśnictwie oraz rolnictwie, to nieodłącznym elementem jest oprogramowanie fotogrametryczne. Jesteśmy autoryzowanym dystrybutorem programów Pix4Dmapper.
Całość oferty uzupełniają szkolenia, które prowadzą doświadczeni instruktorzy w Ośrodku Szkoleniowym NaviGate.
Wybierając firmę NaviGate możemy być pewni że zostaniemy obsłużeni kompleksowo, poczynając od prezentacji i doboru odpowiedniego sprzętu, przez zakup, po odpowiednie szkolenie które pozwoli nam od razu przystąpić do pracy i działania.