Sprawdziłem dokładność ortofotomapy pozyskanej z niskiego pułapu za pomocą bezzałogowego statku powietrznego DJI Phantom 4 RTK w zależności od ilości zastosowanych fotopunktów (GCP). Na potrzeby testów wykorzystano bazę pomiarową, której koncepcja i realizacja została wykonana przez pracowników Wydziału Geodezji Górniczej i Inżynierii Środowiska Akademii Górniczo-Hutniczej im. Stanisława Staszica w Krakowie. Rezultaty przedstawiam poniżej.
Informacje wstępne
| Wykonawca: | inż. Maciej Wywiał – specjalista ds. wykorzystania bezzałogowych statków powietrznych w fotogrametrii |
| Cel: | Weryfikacja dokładności ortofotomapy pozyskanej z niskiego pułapu za pomocą bezzałogowego statku powietrznego DJI Phantom 4 RTK w zależności od ilości zastosowanych fotopunktów (GCP) |
| Data i miejsce wykonania nalotu: | Bochnia – 17.01.2019 r. |
| Powierzchnia opracowania: | 10 ha (250m x 400m) |
| Wykorzystany sprzęt: | DJI Phantom 4 RTK, odbiornik GNSS Spectra Precision SP60 z kontrolerem Nomad 1050 |
| Wykorzystane oprogramowanie: | Pix4Dmapper, Survey Pro, GNSS Solution, MS Excel, QGIS |
| Konsultacje naukowe: | Akademia Górniczo-Hutnicza w Krakowie |
Lokalizacja pomiaru
Baza pomiarowa została ulokowana na osiedlu Niepodległości w Bochni ze względu na bardzo zróżnicowany teren co do rzeźby (spadek terenu w kierunku wschodnim), wysokie – 5-kondygnacyjne bloki mieszkalne oraz liczne drzewa. Teren objęty testami ma wymiar około 250 m x 400 m i zajmuje powierzchnię około 10 ha.
Przebieg testów
Pierwszym krokiem było pomierzenie sieci fotopunktów oraz punktów kontrolnych odbiornikiem GNSS. Pomiar wykonano metodą RTN wykorzystując do tego dwa odbiorniki Spectra Precision SP60 (statyczny – baza oraz kinematyczny – rover) skomunikowane ze sobą za pomocą Bluetooth dalekiego zasięgu. Jako punkty przyjęto charakterystyczne szczegóły terenowe np. studzienki, linie parkowania itp., a na dachach budynków zastabilizowano tarcze pomiarowe. Dane z pomiaru opracowano w programie GNSS Solutions z dokładnością pojedynczej pikiety ±2 cm.
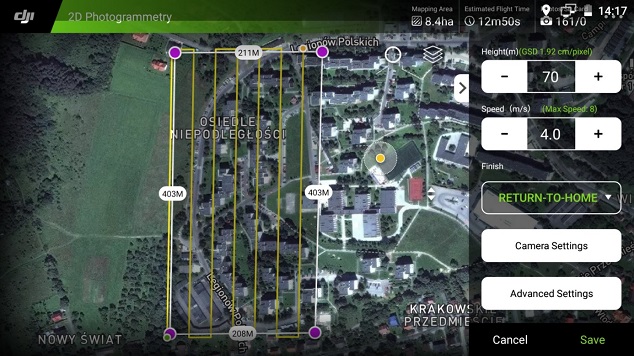
Następnie wykonano nalot fotogrametryczny o następujących parametrach:
- wysokość lotu względem miejsca startu (AGL) – 70 m, co przekłada się na 2-centymetrowy piksel terenowy (GSD)
- prędkość poruszania się bezzałogowego statku powietrznego – 4 m/s
- zachowanie BSL po ukończeniu misji (wybrano powrót do miejsca startu) – RETURN-TO-HOME.
- Rozmiar zdjęcia – wybrano 3:2
- Balans bieli – SUNNY
- Kąt kamery – 90°
- Stałe ustawienie czasu naświetlania – automatyczne
- Automatyczna korekcja dystorsji – wyłączona
- Pokrycie poprzeczne zdjęć – 70%
- Pokrycie podłużne zdjęć – 70%
Ilość szeregów i długość baz jest automatycznie wyliczana w aplikacji na podstawie zadeklarowanego: obszaru, pokrycia poprzecznego i wielkości piksela terenowego. Misja trwała około 13 minut podczas której wykonano 156 zdjęć.
Opracowanie danych w programie Pix4Dmapper
Przetwarzanie danych w programie Pix4Dmapper dzieli się na 3 etapy:
- Initial Processing – jest to najważniejszy proces całego etapu. W tym etapie przeprowadzana jest aerotriangulacja, samokalibracja oraz wyrównanie bloku zdjęć.
- Point Cloud and Mesh – moduł odpowiedzialny za wygenerowanie chmury punktów i jej klasyfikację. W oparciu o chmurę punktów tworzony jest model 3D (mesh)
- DSM, Orthomosaic and Index – w trzecim kroku generowane są: numeryczny model pokrycia terenu (NMPT = DSM), numeryczny model terenu (NMT = DTM), ortofotomozaika oraz indeksy wegetacji, w przypadku zastosowania kamer multispektralnych.
Po zaimportowaniu zdjęć Pix4Dmapper automatycznie wybrał odpowiedni układ współrzędnych. Na podstawie metadanych EXIF zawartych w zdjęciach, program odtworzył wysokodokładne, przybliżone położenie zdjęć. Następnie wczytano plik tekstowy ze współrzędnymi fotopunktów i punktów kontrolnych i wskazano je na zdjęciach. Na potrzeby projektu wszystkim punktom przypisano typ – Check Point, a w późniejszych analizach systematycznie adaptowano je jako fotopunkty.
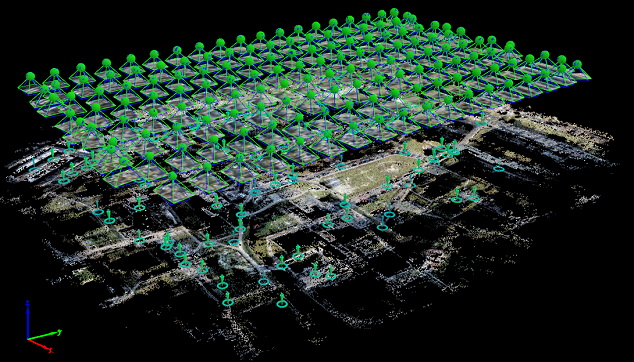
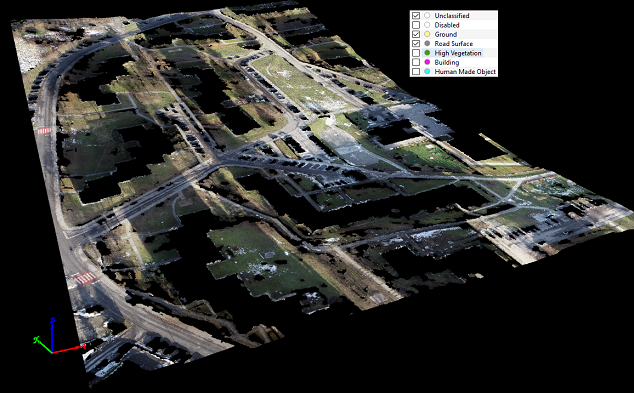
Po uzyskaniu zadowalających wyników dokładnościowych przystąpiono do generowanie gęstej chmury punktów i modelu 3D (mesh). Chmura punktów została również sklasyfikowana – Rysunek 3. Na poniższym obrazu przedstawiono wynik klasyfikacji, wyłączono grupy: Roślinność – High Vegetation, na której głównie znajdują się wysokie drzewa; Budynki – Building; na której znajdują się budynki; oraz obiekty stworzone przez człowieka – Human Made Object, na której głównie znajdują się widoczne samochody.

Analiza dokładności
W celu oceny dokładności na zdjęciach zostały wskazane 72 punkty pomierzone zarówno na poziomie gruntu jak i na dachach budynków. W pierwszym wariancie wyrównania wszystkie 72 punkty zostały oznaczone jako Check Points, to oznacza że żaden z punktów nie wziął udziału w wyrównaniu bloku, posłużyły one tylko do kontroli poprawności całego procesu. Całe wyrównanie oparło się o wysokodokładne środki rzutów zdjęć.
Kolejne warianty zakładały adaptowanie jednego z punktów kontrolnych jako fotopunktu, zatem liczba punktów kontrolnych malała, a liczba fotopunktów rosła. Wartości błędów przedstawiono w tabelach oraz na wykresach.
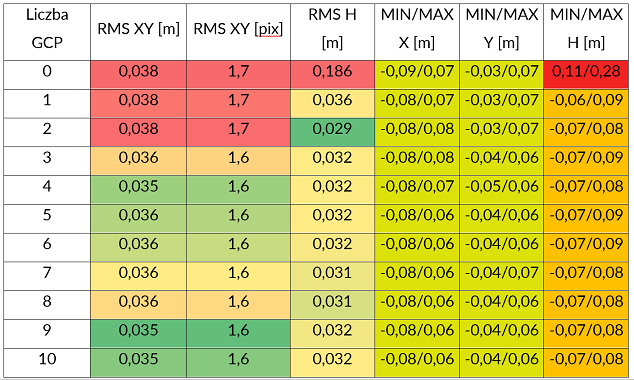
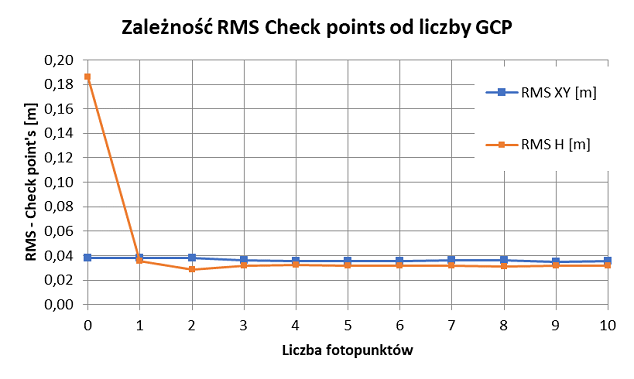
Z analizy wynika, że zastosowanie liczby fotopunktów nie wpływa na dokładność RMS dla współrzędnych płaskich XY. Przeliczając błąd podany w metrach na rozmiar piksela terenowego, który wynosi 2,25 cm, średnio błąd nie przekracza 1,5 piksela. Natomiast zastosowanie jednego fotopunktu pozwala uzyskać RMS dla współrzędnych H na poziomie 4 cm. W przypadku braku fotopunktów RMS H wynosił aż 19 cm. W wyniku otrzymujemy model, który jest wewnętrznie wysokościowo zgodny, ale bezwzględnie jest on przesunięty względem fizycznej powierzchni terenu. Dodając jeden fotopunkt dostarczamy do wyrównania obserwację, której zastosowanie pozwala wpasować model zarówno w wysokości względnej i bezwzględnej.
Z analizy błędów min/max wynika, że utrzymują się one na tym samym poziomie w przypadku X i Y, a zastosowanie jednego fotopunktu zmniejszyło maksymalny błąd wysokościowy.
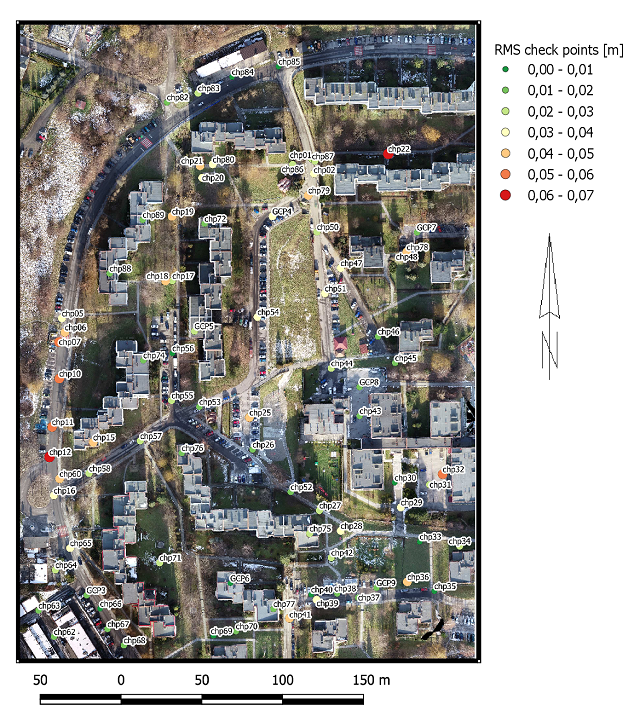
Mapa odchyłek RMS na punktach kontrolowanych
Podsumowanie
Wyniki dokładnościowe spełniły nasze oczekiwania. Analiza błędów na punktach kontrolnych wykazała, że ilość fotopunktów nie wpływa na błąd średni położenia XY – wynosi zawsze ~3,5 cm, natomiast zastosowanie jednego fotopunktu w ogromnym stopniu wpływa na dokładność wysokościową całego modelu – ~4cm. Zostały pomierzone i wskazane aż 72 punkty kontrolne na powierzchni terenu i na budynkach, wiec nie można tutaj mówić o przypadkowym błędzie.
Kraków (KRA1), Proszowice (PROS), Tarnów (TRNW) – w oparciu o te stacje referencyjne zostało przeprowadzone wyrównanie osnowy, jak i sam dron korzystał z poprawek RTN pochodzących z tych stacji. Gdyby stacje referencyjne znajdowały się bliżej lokalizacji nalotu (KRA1 ~ 40 km; Proszowice ~25 km; Tarnów ~40 km) błąd byłby odpowiednio niższy. Zależało nam na przeprowadzeniu testów w realistycznych warunkach, na poprawkach pochodzących z sytemu ASG-EUPOS, najczęściej stosowanego przez geodetów, gdzie średnie odległości od stacji wynoszą około 40 km.
Precyzyjnie wyznaczone środki rzutów za pomocą Phantoma 4 RTK wpłynęły pozytywnie na czas przetwarzania danych. Na laptopie za około 6500 zł (o dokładne parametry możesz mnie zapytać wysyłając wiadomość e-mail lub dzwoniąc, chętnie odpowiem ?) aerotriangulacja (1 etap) trwa około 10 minut, generowanie gęstej chmury punktów na średnich parametrach (łącznie z jej klasyfikacją) oraz modelu mesh (2 etap) – niecałe 30 minut. Generowanie DSM, ortofotomozaiki oraz DTM (czyli 3 etap) – 25 minut. Łącznie czas przetwarzania wszystkich trzech etapów ze wskazaniem punktów na zdjęciach trwało ok. 1,5 h.
Najpopularniejsze pytanie, jakie dostajemy od geodetów – „Czy można osiągnąć centymetrową dokładność za pomocą bezzałogowego statku powietrznego bez punktów GCP?”. Przypuszczamy, że można przy założeniu, że stacja referencyjna znajduje się do 10 km od miejsca przeprowadzenia nalotu. W niedługim czasie można spodziewać się dalszej części analizy, w której zostanie wykorzystana stacja bazowa DJI D-RTK2 dedykowana do DJI Phantom 4 RTK.
Dodatkowo wykonano również przykładowy nalot w dwóch kierunkach z kamerą ustawioną pod kątem 75°. Nalot testowy pokazał, że model 3D wykonany z użyciem zdjęć ukośnych prezentuje się lepiej, niż ten opracowany jedynie na postawie zdjęć pionowych. Na temat modelowania 3D w przyszłości również można spodziewać się osobnego artykułu.

W imieniu firmy NaviGate serdecznie dziękuję za pomoc przy opracowaniu artykułu pracownikom Wydziału Geodezji i Inżynierii Środowiska Akademii Górniczo-Hutniczej im. Stanisława Staszica w Krakowie.
Ortofotomozaika

Oferta specjalna: DJI Phantom 4 RTK + Pix4Dmapper w zestawie
Zobacz naszą specjalną ofertę na zestaw z bezzałogowym statkiem powietrznym DJI Phantom 4 RTK i oprogramowaniem Pix4Dmapper. Uzyskaj centymetrowe dokładności pomiaru z drona bez pomiarów punktów GCP.