Oprogramowania pomiarowe informują nas o aktualnym błędzie pomiaru mierzonego punktu. Dla wielu z nas informacją bardziej interesującą jest parametr DOP (Dilution Of Precision). Jest to współczynnik rozmycia pozycji, który określa jakość rozmieszczenia satelitów na nieboskłonie i zarazem pozwala nam na ocenę wykonanego pomiaru. Istnieje jednak wiele czynników wpływających na błąd obliczenia mierzonej pozycji, o których powinniśmy pamiętać.
W niniejszym artykule skupimy się przede wszystkim na błędach propagacji sygnału, z racji iż te dotykają nas najczęściej, generując przy tym nie raz uporczywe błędy. W skład powyższej grupy wchodzą błędy refrakcji jonosferycznej, refrakcji troposferycznej, wielotorowości sygnału.
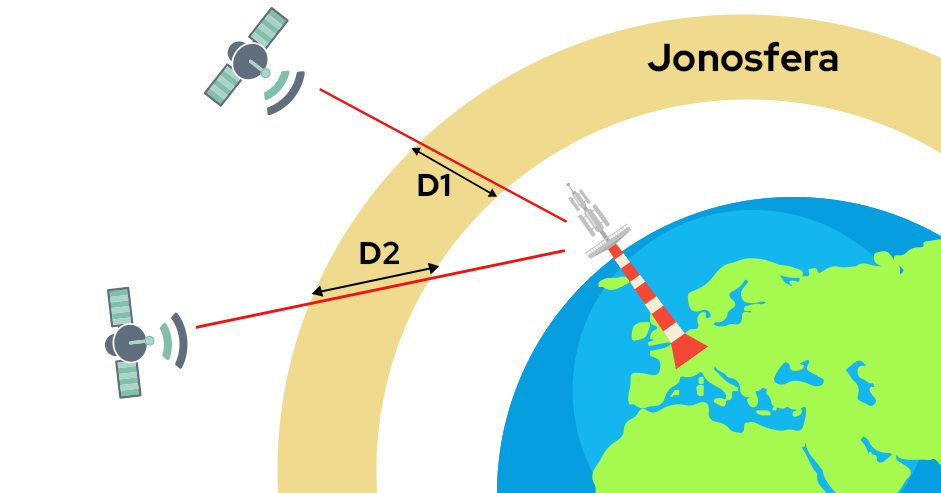
Refrakcja jonosferyczna
W przypadku refrakcji jonosferycznej bardzo często błędy pomiaru podawane są w jednostkach czasu jako opóźnienie sygnału w stosunku do przebiegu sygnały wzorcowego. Dzieje się tak ponieważ pozycja określana jest na podstawie odległości odbiornika od satelity w odstępie czasu w jaki sygnał przebył odległość między nimi.
Jednym z najpoważniejszych i wszechobecnych źródeł błędów wyznaczania pozycji w systemach GNSS jest wpływ jonosfery. Jonosfera jest warstwą atmosfery ziemskiej odznacza się obecnością znacznej liczby swobodnych elektronów i jonów, rozciąga się na wysokości od 50 km do 1000 km nad powierzchnią Ziemi, powstaje w wyniku jonizacji powietrza, głównie pod działaniem promieniowania słonecznego. Jej struktura zmienia się w zależności od pory dnia i wpływa na propagację fali.
Standardowo opóźnienie jonosferyczne w nocy występuje na poziomie 10 ns, natomiast w czasie dnia wzrasta do 50 ns. W rejonach położonych w pobliżu równika lub biegunów geograficznych może być znacznie większe, szczególnie podczas trwania burz magnetycznych.
W celu skorygować błędu refrakcji jonosferycznej, wykorzystuje się metodę porównawczą różnicy faz sygnałów L1 oraz L2. Dzięki temu możemy dokładnie określić czas propagacji sygnału.
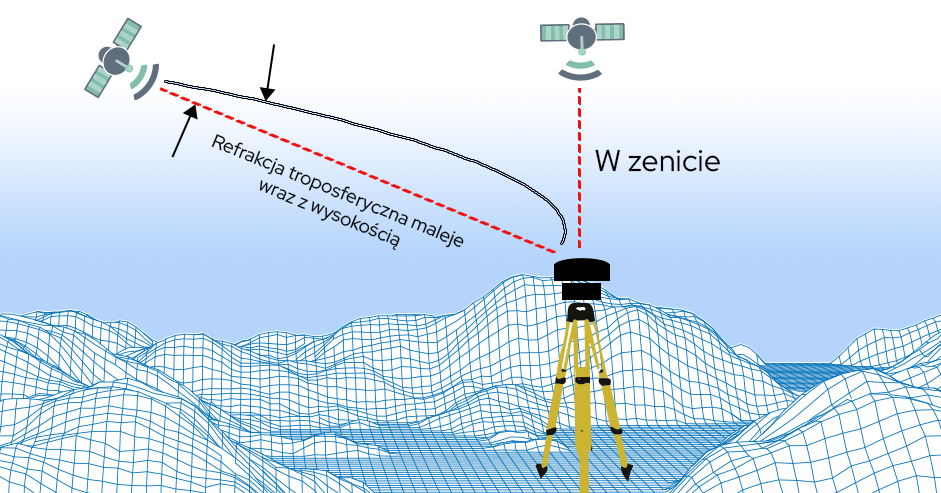
Refrakcja troposferyczna
Najbliższą powierzchni Ziemi i jednocześnie najcieńszą warstwą atmosfery jest troposfera. Rozciąga się średnio do wysokości 10 km. Refrakcja troposferyczna powoduje znacznie mniejszy niż jonosfera błąd pomiaru odległości pomiędzy odbiornikiem a satelitą. Błąd troposferyczny polega na zmianie prędkości sygnału emitowanego przez satelitę przy przejściu przez troposferę. Na skutek ugięcia fal elektromagnetycznych droga, jaką przebywa sygnał wydłuża się, co generuje wzrost czasu w jakim sygnał pokona dystans od satelitów do odbiornika.
Najlepszą metodą eliminowania błędów spowodowanych opóźnieniem troposferycznym jest zastosowanie systemów różnicowych, generowanie poprawek oraz modelowanie troposfery przy wykorzystaniu aktualnych danych meteorologicznych, ciśnienia, temperatury i wilgotności.
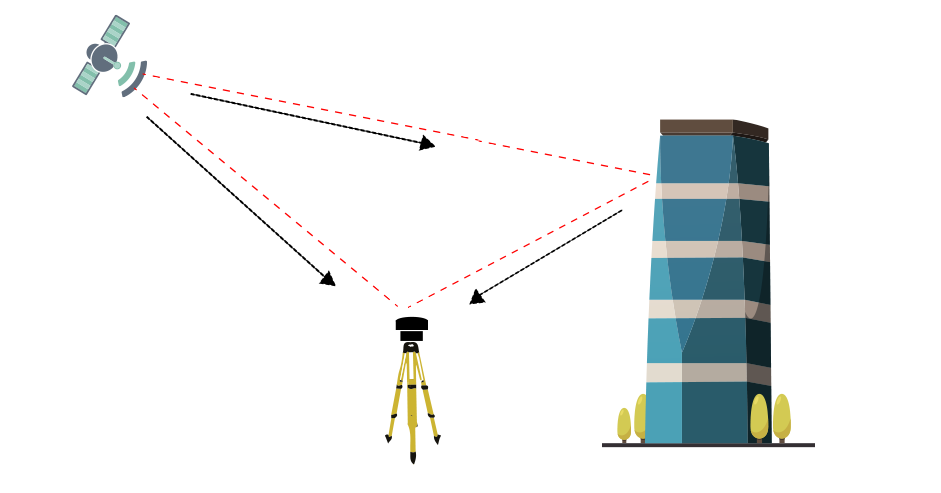
Błąd wielotorowości
Jednym z czynników obniżających dokładność wyznaczania pozycji punktu na podstawie pomiarów sygnałów GNSS jest efekt wielotorowości (Multipath Signal Propagation). Antena odbiornika GNSS odbiera nie tylko fale elektromagnetyczne bezpośrednio od poszczególnych satelitów systemu, ale również fale odbite od różnych przeszkód terenowych. Fale te odbijają się zarówno od konstrukcji żelbetonowych i metalowych, jak również od podłoża. Fale odbite interferują z falą bezpośrednio napływającą od satelity, co w efekcie powoduje odbiór fali wypadkowej o zmienionej amplitudzie i fazie. Wielkość i charakter efektu wielotorowości jest ściśle związany z otoczeniem w jakim znajduje się antena.
Najskuteczniejszym sposobem uniknięcie błędu wielotorowości jest odpowiedni wybór stanowiska pomiarowego, co oczywiście może nam przysporzyć nie lada problemów, zwłaszcza w terenie zurbanizowanym. W celu określenia wpływu błędu wielotorowości na wynik pomiarów, możemy posłużyć się dwiema metodami – analizą stosunku sygnału do szumu w funkcji czasu lub analizą pojedynczych różnic utworzonych między pomiarami pseudoodległości a pomiarami fazowymi danego satelity na danym punkcie pomiarowym.