Bezzałogowe statki powietrzne stały się nieodłącznym narzędziem pracy w wielu dziedzinach, począwszy od pomiarów geodezyjnych, kartografii, fotogrametrii niskiego pułapu poprzez budownictwo, górnictwo, geologię, inspekcje oraz inwentaryzacje, aż do ratownictwa i wsparcia działań w sytuacjach kryzysowych.
Informacje wstępne:
| Wykonawcy: | Grzegorz Durło, Maciej Wywiał, Kamil Tomiak |
| Misja SBSP: | Maciej Wywiał |
| Skanowanie: | Grzegorz Durło |
| Pomiary GNSS: | Kamil Tomiak |
| Opracowanie fotogrametryczne: | Maciej Wywiał |
| Cel | wykonanie dokładnej rekonstrukcji 3D budynku starej prochowni |
| Data i miejsce wykonania nalotu: | 25-04-2022; Wzgórze Swaroga, dzielnica Podgórze, Kraków, woj. małopolskie |
| Powierzchnia opracowania: | 0,1 ha |
| Wykorzystany Sprzęt: | UAV DJI Matrice 300 RTK, kamera DJI Zenmuse P1, tachimetr robotyczny Spectra Focus 35, odbiornik GNSS Spectra Precision SP85, iPhone 11 Pro, moduł RTK viDoc, smartfon XIAOMI 11 Lite. |
| Oprogramowanie: | Pix4Dcatch, DJI Pilot, Pix4Dmapper, QGIS 2.18, CloudCompare |
Wstęp
Wzrost popularności ręcznych urządzeń skanujący w ostatnim czasie zawdzięczamy technologii LiDAR, w którą wyposażone są smartfony firmy Apple począwszy od serii 12 PRO z 2020 roku. Znana od dawna metoda teledetekcji naziemnej Light Detection and Ranging oparta jest na pomiarze odległości poprzez oświetlanie obiektu światłem laserowym, a następnie pomiar odbicia za pomocą czujnika w postaci fotodiody (technologia Time-of-Flight). Nie bez znaczenia jest także jakość sensora optycznego RGB, w który wyposażony jest iPhone oraz rewelacyjny procesor Apple A14 Bionic co z pewnością doceniają jego użytkownicy. Całość tworzy wydajny i niezwykle dokładny zestaw urządzeń optycznych pozwalających na wykonanie rekonstrukcji 3D obiektów niemal w każdych warunkach oświetleniowych w tym tzw. DepthMap (Ryc. 1). Wykorzystanie sensora LIDAR w fotogrametrii (Fotogrametria Bliskiej Odległości) możliwe jest przede wszystkim dzięki aplikacji Pix4Dcatch stworzonej przez Szwajcarską firmę z Lozanny https://www.pix4d.com/product/pix4dcatch. Aplikacja oferuje algorytmy pozwalające na automatyczne nagrywanie wideo wraz informacjami o położeniu i orientacji zdjęć klatka po klatce, ponadto użytkownicy mogą skorzystać z trybu podwyższone precyzji dzięki modułowi viDoc RTK Rover współpracującemu z iPhone https://www.pix4d.com/product/vidoc-rtk-rover

Ryc. 1. Przykłady map głębokości w formacie graficznym Tiff
Lokalizacja obiektu
Ruiny budynku starej prochowni z okresu I wojny światowej zlokalizowanego na Wzgórzu Swaroga w dzielnicy Podgórze w Krakowie w rejonie kamieniołomu Liban (Ryc. 2). Wypukła forma terenu, niewielkie nachylenie ok 5 do 7%, ekspozycja południowa. Wokół trawa oraz zarośla, pojedyncze drzewa od strony wschodniej oraz północnej. Współrzędne obiektu: 50.12258367; 19.52916934; wysokość bezwzględna 233,61 m n.p.m. (CS92). Budynek złożony jest z jednej kondygnacji oraz fragmentu ściany szczytowej, zwieńczony stropem betonowym o łącznej kubaturze około 120 m3. Elewacja wykonana z cegły, częściowo pokryta tynkiem, widoczne ślady wzmocnienia pustakiem ceramicznym (Fot. 1).
 Ryc. 2. Rejon opracowania (żółta ramka)
Ryc. 2. Rejon opracowania (żółta ramka)

Zdjęcie 1. Ruiny starej prochowni na wzgórzu Swaroga w Krakowie
Przebieg pomiarów
W pierwszej kolejności wykonano serię pomiarów naziemnych przy użyciu precyzyjnego odbiornika Spectra SP85 na tyczce z uchwytem typu tripod oraz rejestratorem MobileMapper 60 wyposażonym w oprogramowanie terenowe Spectra Geospatial Origin. Pomiary były uśrednieniem 30 epok pomiarowych. Korzystano z poprawek NTRIP (RTN – serwis ASG-EUPOS). Następnie metodą wcięcia wstecz ustawiono 2 stanowiska swobodne tachimetru Spectra Focus 35.
Tabela 1 . Współrzędne stanowisk pomiarowych tachimetru Spectra Focus 35
| Lp. | Oznaczenie | X | Y | Z |
| 1 | Stan 1 | 5544611,195 | 7425242,032 | 250,485 |
| 2 | Stan 2 | 5544636,002 | 7425258,964 | 251,505 |
Pomiary wykonano w miejscach zainstalowania fotopunktów tj. 6 plansz o wymiarach 40 na 40 cm ułożonych na ziemi na stałe, sekwencja pomiaru w trybie bieżący/uśredniony 5 s z poprawkami NTRIP. W tabeli nr 1 podano dane z pomiarów. Następnie, na obiekcie zawieszono 15 białych plansz pomiarowych o wymiarach 12 na 12 cm z krzyżami nitkowymi, które stanowiły osnowę pomiarową do rekonstrukcji 3D budynku. Pomiary współrzędnych punktów na elewacji wykonano przy użyciu tachimetru robotycznego Spectra Focus 35 z rejestratorem MobileMapper 60. W celu zachowania wysokiej dokładności nawiązanie stanowiska oraz osnowę fotogrametryczną pomierzono z wykorzystaniem mini-pryzmatu, a tarcze na obiekcie bezlustrowo (Tab. 1-3).
Tabela 2. Wyniki pomiarów współrzędnych fotopunktów na ziemi SP-85 (układ poziomy 2000 strefa 7, układ pionowy EVRF 2007 AMS)
| Lp. | Oznaczenie | X | Y | Z |
| 1 | Foto1 | 5544613,518 | 7425240,497 | 249,002 |
| 2 | Foto2 | 5544622,050 | 7425242,713 | 249,437 |
| 3 | Foto3 | 5544629,519 | 7425236,335 | 249,544 |
| 4 | Foto4 | 5544638,463 | 7425259,497 | 249,945 |
| 5 | Foto5 | 5544628,257 | 7425260,917 | 249,812 |
| 6 | Foto6 | 5544622,819 | 7425267,961 | 249,815 |
Tabela 3. Wyniki pomiarów współrzędnych punktów na elewacji budynku SF3-5 (układ poziomy 2000 strefa 7, układ pionowy EVRF 2007 AMS)
| Lp. | Oznaczenie | X | Y | Z |
| 1 | P1 | 5544624.880 | 7425246.044 | 251.754 |
| 2 | P2 | 5544624.599 | 7425246.108 | 250.481 |
| 3 | P3 | 5544621.123 | 7425247.033 | 251.431 |
| 4 | P4 | 5544621.259 | 7425247.000 | 250.105 |
| 5 | P5 | 5544621.025 | 7425247.861 | 250.913 |
| 6 | P6 | 5544622.611 | 7425254.102 | 250.394 |
| 7 | P7 | 5544623.478 | 7425256.913 | 251.150 |
| 8 | P8 | 5544627.145 | 7425255.967 | 252.049 |
| 9 | P9 | 5544627.013 | 7425256.000 | 250.436 |
| 10 | P10 | 5544627.154 | 7425253.237 | 252.079 |
| 11 | P11 | 5544627.094 | 7425253.057 | 250.557 |
| 12 | P12 | 5544626.290 | 7425249.944 | 251.588 |
| 13 | P13 | 5544625.510 | 7425246.963 | 252.073 |
| 14 | P14 | 5544625.560 | 7425247.140 | 250.876 |
| 15 | P15 | 5544626.002 | 7425246.262 | 250.961 |

Zdjęcie 2. Pomiary terenowe zestawem hybrydowym Spectra Focus 35 oraz Spectra 85

Zdjęcie 3. Platforma DJI Matrice 300 RTK z kamerą DJI Zenmuse P1 (35 mm)
Skanowanie obiektu wykonano przy użyciu dwóch urządzeń, pierwsze z nich iPhone 12 PRO (iOS 14.7.1) z modułem viDoc RTK ROVERr oraz smartfon XIAOMI 11 Lite 5G z systemem Android 11 RKQ1.2. Procedura ręcznego skanowania obejmowała pieszą trasę wokół budynku zgodnie z ruchem wskazówek zegara z prędkością ok. 2 km/h oraz skanowanie stropu w 4 liniach na kierunku wschód -zachód. Odległość od obiektu wynosiła przeciętnie 3,5 metra, ekran ustawiony w pozycji pionowej, w polu widzenia obiektywu znajdowały się wszystkie plakietki z krzyżami nitkowymi umieszczone na elewacji budynku. Podczas skanowania iPhone używano aktywnego modułu RTK z poprawkami ASG-EUPOS. Zapis zdjęć w obu przypadkach odbywał się w pamięci wewnętrznej urządzeń. Łącznie wykonano 654 geotagowanych zdjęć (IPhone + Vidoc) oraz 736 (Xiaomi), które następnie wyeksportowano do chmury Pix4Dcloud Advanced. W tabeli 3 zamieszczono dane pomiarowe punktów na elewacji budynku wykonane przy użyciu iPhone + viDoc RTK Rover NTRIP (Tab. 4 – 6).

Zdjęcie 4. Skanowanie iPhone 11 PRO + viDOC ROVER RTK
 Ryc. 3. Porównanie rozdzielczości modeli 3D wykonanych różnymi technikami w kolumnach od lewej: DJI Zenmuse P1, iPhone 11 PROI + viDoc oraz XIAOMI 11 Lite
Ryc. 3. Porównanie rozdzielczości modeli 3D wykonanych różnymi technikami w kolumnach od lewej: DJI Zenmuse P1, iPhone 11 PROI + viDoc oraz XIAOMI 11 Lite
Tabela 4. Wyniki pomiarów współrzędnych punktów na elewacji budynku iPhone 12 PRO + viDoc RTK (układ poziomy 2000 strefa 7, układ pionowy EVRF 2007 AMS)
| Lp. | Oznaczenie | X | Y | Z Corr |
| 1 | V1 | 5544624,895 | 7425246,046 | 251,706 |
| 2 | V2 | 5544624,610 | 7425246,104 | 250,433 |
| 3 | V3 | 5544621,141 | 7425247,044 | 251,384 |
| 4 | V4 | 5544621,272 | 7425247,005 | 250,056 |
| 5 | V5 | 5544621,044 | 7425247,871 | 250,865 |
| 6 | V6 | 5544622,629 | 7425254,108 | 250,336 |
| 7 | V7 | 5544623,498 | 7425256,921 | 251,085 |
| 8 | V8 | 5544627,160 | 7425255,972 | 251,987 |
| 9 | V9 | 5544627,034 | 7425256,006 | 250,374 |
| 10 | V10 | 5544627,167 | 7425253,243 | 252,019 |
| 11 | V11 | 5544627,111 | 7425253,060 | 250,498 |
| 12 | V12 | 5544626,304 | 7425249,948 | 251,528 |
| 13 | V13 | 5544625,524 | 7425246,969 | 252,017 |
| 14 | V14 | 5544625,574 | 7425247,141 | 250,820 |
| 15 | V15 | 5544626,013 | 7425246,261 | 250,906 |
Tabela 5. Wyniki pomiarów współrzędnych punktów na elewacji budynku DJI Matrice 300 RTK z kamerą Zenmuse P1
| Lp. | Oznaczenie | X | Y | Z Corr |
| 1 | V1 | 5544624,887 | 7425246,046 | 251,727 |
| 2 | V2 | 5544624,601 | 7425246,110 | 250,452 |
| 3 | V3 | 5544621,129 | 7425247,032 | 251,403 |
| 4 | V4 | 5544621,263 | 7425246,998 | 250,076 |
| 5 | V5 | 5544621,036 | 7425247,868 | 250,879 |
| 6 | V6 | 5544622,619 | 7425254,112 | 250,367 |
| 7 | V7 | 5544623,489 | 7425256,912 | 251,113 |
| 8 | V8 | 5544627,151 | 7425255,966 | 252,015 |
| 9 | V9 | 5544627,021 | 7425255,997 | 250,403 |
| 10 | V10 | 5544627,161 | 7425253,240 | 252,051 |
| 11 | V11 | 5544627,101 | 7425253,053 | 250,531 |
| 12 | V12 | 5544626,298 | 7425249,943 | 251,550 |
| 13 | V13 | 5544625,517 | 7425246,961 | 252,035 |
| 14 | V14 | 5544625,565 | 7425247,142 | 250,840 |
| 15 | V15 | 5544626,002 | 7425246,267 | 250,933 |
Tabela 6. Wyniki pomiarów współrzędnych punktów na elewacji budynku XIAOMI Lite 11
| Lp. | Oznaczenie | X | Y | Z |
| 1 | V1 | 5544627,853 | 7425247,196 | 249,360 |
| 2 | V2 | 5544627,608 | 7425247,224 | 248,111 |
| 3 | V3 | 5544624,141 | 7425247,858 | 248,953 |
| 4 | V4 | 5544624,297 | 7425247,813 | 247,660 |
| 5 | V5 | 5544623,985 | 7425248,645 | 248,429 |
| 6 | V6 | 5544625,010 | 7425254,794 | 247,844 |
| 7 | V7 | 5544625,566 | 7425257,588 | 248,549 |
| 8 | V8 | 5544629,164 | 7425257,002 | 249,503 |
| 9 | V9 | 5544629,067 | 7425257,011 | 247,928 |
| 10 | V10 | 5544629,441 | 7425254,373 | 249,564 |
| 11 | V11 | 5544629,427 | 7425254,173 | 248,088 |
| 12 | V12 | 5544628,887 | 7425251,109 | 249,131 |
| 13 | V13 | 5544628,378 | 7425248,164 | 249,659 |
| 14 | V14 | 5544628,450 | 7425248,312 | 248,488 |
| 15 | V15 | 5544628,935 | 7425247,492 | 248,601 |
Opracowanie danych
Opracowanie wykonano na komputerze DELL Vostro P71F w aplikacji Pix4Dmapper (wersja 4.8.0). Średnia wartość wskaźnika EIQ dla zdjęć wykonanych kamerą P1 wyniosła 0,827 (±0,006) piksel terenowy 0.91 cm/pix. Do wyrównania zdjęć nie korzystano z fotopunktów (GCP), wszystkie punkty pomierzono klasycznie za pomocą tachimetru, one zaś posłużyły jako punkty kontrolne (ang. Check Points). Modele 3D wykonane na podstawie zdjęć ze smartfonów cechowały się wyższą rozdzielczością, dla nich bowiem piksel terenowy wynosił 0,20 cm. Wygenerowaną chmurę punktów wyeksportowano do pliku LAS natomiast model 3D wraz z teksturami zapisano w formatach PLY, FBX oraz DXF.
Wyniki analizy dokładności
Porównanie wyników pomiaru wykonanego 3 metodami tj. przy użyciu zdjęć iPhone + viDoc RTK, zdjęć z kamery Zenmuse P1 oraz hybrydowego pomiaru punktowego potwierdziło wysoką jakość danych, natomiast analiza błędów wskazuje na to, iż urządzenie ręczne znakomicie spisuje się w terenie zapewniając oczekiwaną dokładność. Wszystkie 15 tarcz pomiarowych z każdego zestawu danych pomierzono metodą analitycznego wcięcia w przód na podstawie pomiaru monoskopowego na zdjęciach (Ryc. 4). Różnice pomiędzy współrzędnymi pomierzonymi tachimetrem Focus 35, a współrzędnymi z pomiaru na zdjęciach przedstawiono na rycinach 5-7, wielkości błędów RMSE dla macierzy z misji FNP oraz zdjęć iPhone z systemem viDOC RTK ROVER zamieszczono na diagramie nr 8.
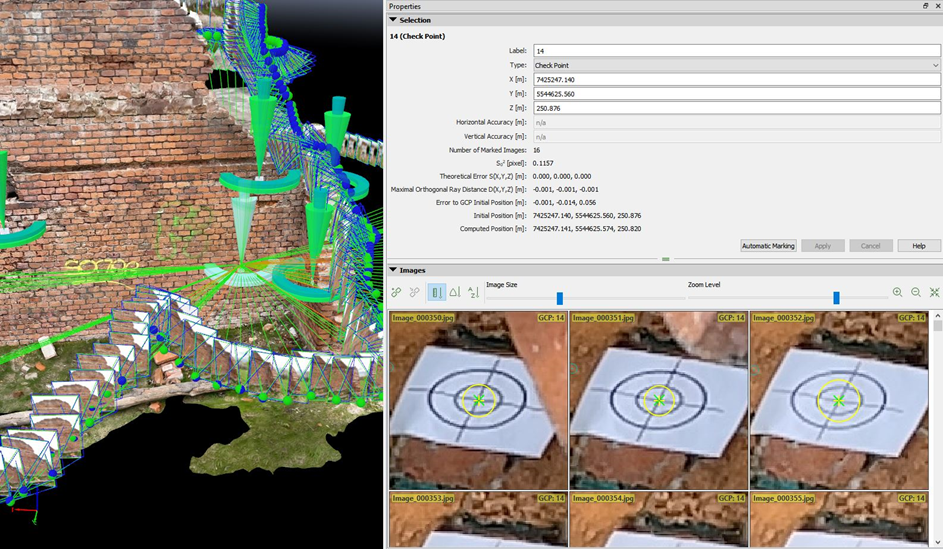
Ryc. 4. Pomiar monoskopowy na zdjęciach w programie Pix4Dmapper
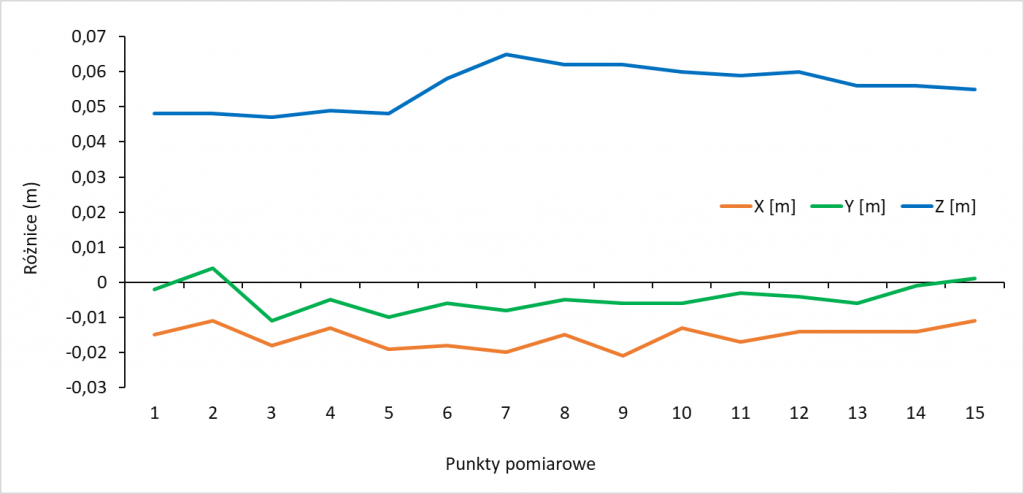
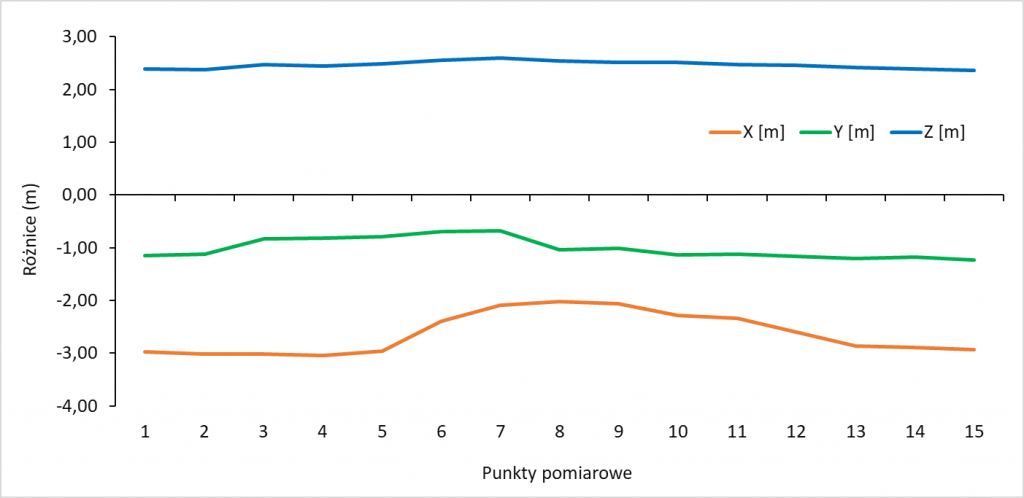
Ryc. 5. Różnice pomiędzy współrzędnymi pomierzonymi tachimetrem Focus 35, a współrzędnymi z pomiaru na zdjęciach wykonanych iPhone 11 PRO z systemem viDOC RTK ROVER
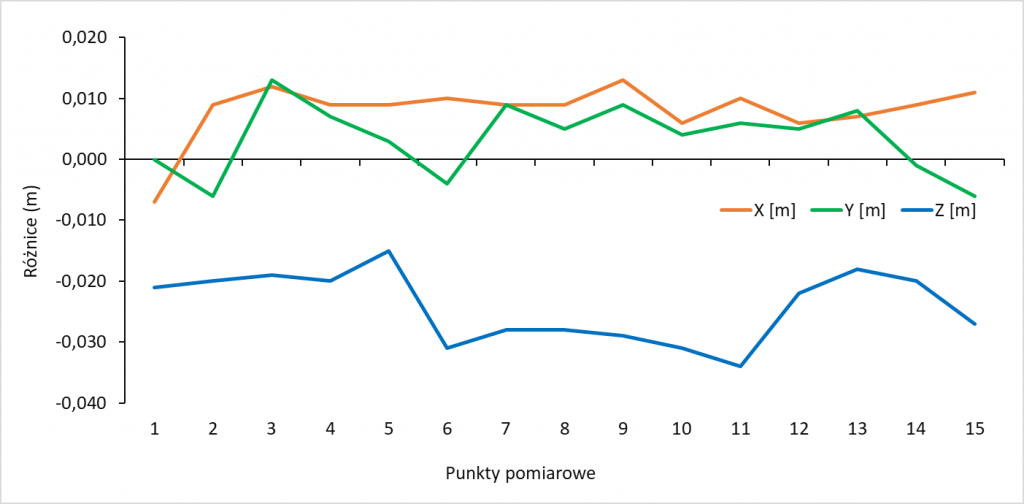
Ryc. 6. Różnice pomiędzy współrzędnymi pomierzonymi tachimetrem Focus 35, a współrzędnymi z pomiaru na zdjęciach wykonanych kamerą Zenmuse P1 z pokładu DJI Matrice 300 RTK
Ryc. 7. Różnice pomiędzy współrzędnymi pomierzonymi tachimetrem Focus 35, a współrzędnymi z pomiaru na zdjęciach wykonanych smartfonem XIAOMI Lite 11
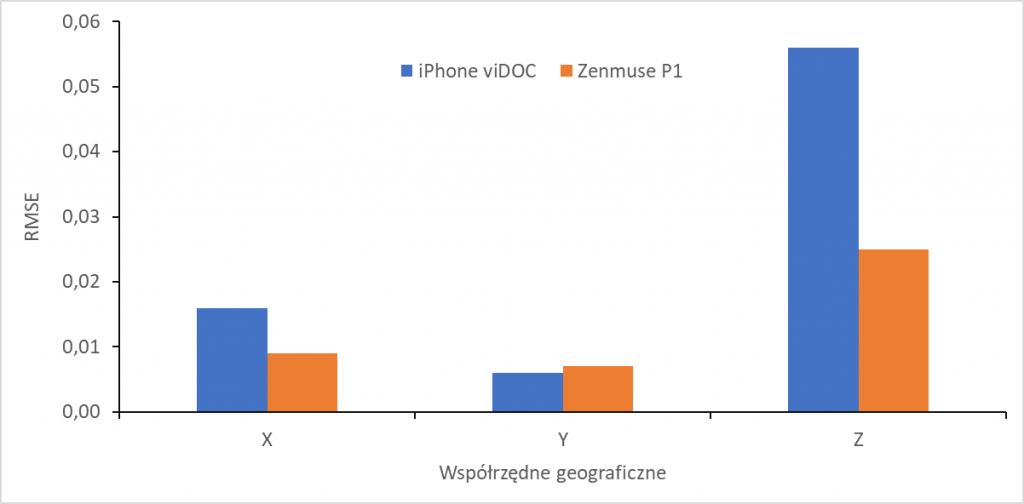
Ryc. 8. Pierwiastek z błędu średniokwadratowego RMSE współrzędnych XY wyznaczonych0 w oparciu o zdjęcia z iPhone 11 PRO oraz DJI Zenmuse P1 w stosunku do danych z tachimetru Focus 35
Błąd średniokwadratowy RMSE dla serii pomiarów z drona oraz IPhone wynosi ± 2,0 cm w osi XY. Stały znak przy błędach na osi Z oznacza, że model był przesunięty o stałą wartość, w przypadku modelu wygenerowanego na podstawie zdjęć z kamery Zenmuse P1 było to 3,0 cm, w przypadku zestawu IPhone z viDoc ROVER przesunięcie modelu wynosiło 5,5 cm. Oznacza to, że w obu przypadkach spełnione są standardy techniczne wykonania geodezyjnych pomiarów sytuacyjnych dla szczegółów terenowych z I grupy. Pomiar wysokości względnej w obu metodach także spełnia kryteria dokładności na poziomie ± 2,0 cm. Problemem może być jedynie odczytanie wysokości bezwzględnej w konkretnym układzie wysokościowym, aby to zrobić konieczne jest wyrównanie bloku zdjęć z wykorzystaniem fotopunktów. Wyniki analizy dokładności modelu 3D wykonanego przy pomocy smartfona Xiaomi Lite znacznie odbiegają od poprzednich metod. Zauważono niewielkie skręcenie modelu, co wpływa na pomiary odległości względnej. Pomierzono kilka odcinków pomiędzy tarczami pomiarowymi i stwierdzono, że na krótkim dystansie do 2,0 m błąd ten wynosił 5,0 cm, przy dłuższych odcinkach od 5 do 6 m błąd ten zwiększał się i osiągał nawet 20,0 cm. Niedokładność tę można wyeliminować poprzez zastosowanie fotopunktów lub skalarów. W projekcie zrezygnowano jednak z tej metody, aby porównać dokładności wszystkich zestawów urządzeń zgodnie z ich nominalnymi parametrami operacyjnymi.
Tabela 7. Współrzędne punktów na elewacji budynku w oparciu o pomiar w chmurze Pix4Dcloud na modelu 3D wykonanym iPhone + viDoc RTK ROVER
| Lp. | Oznaczenie | X | Y | Z |
| 1 | V1 | 5544624,895 | 7425246,046 | 251,706 |
| 2 | V2 | 5544624,610 | 7425246,104 | 250,433 |
| 3 | V3 | 5544621,141 | 7425247,044 | 251,384 |
| 4 | V4 | 5544621,272 | 7425247,005 | 250,056 |
| 5 | V5 | 5544621,044 | 7425247,871 | 250,865 |
| 6 | V6 | 5544622,629 | 7425254,108 | 250,336 |
| 7 | V7 | 5544623,498 | 7425256,921 | 251,085 |
| 8 | V8 | 5544627,160 | 7425255,972 | 251,987 |
| 9 | V9 | 5544627,034 | 7425256,006 | 250,374 |
| 10 | V10 | 5544627,167 | 7425253,243 | 252,019 |
| 11 | V11 | 5544627,111 | 7425253,060 | 250,498 |
| 12 | V12 | 5544626,304 | 7425249,948 | 251,528 |
| 13 | V13 | 5544625,524 | 7425246,969 | 252,017 |
| 14 | V14 | 5544625,574 | 7425247,141 | 250,820 |
| 15 | V15 | 5544626,013 | 7425246,261 | 250,906 |
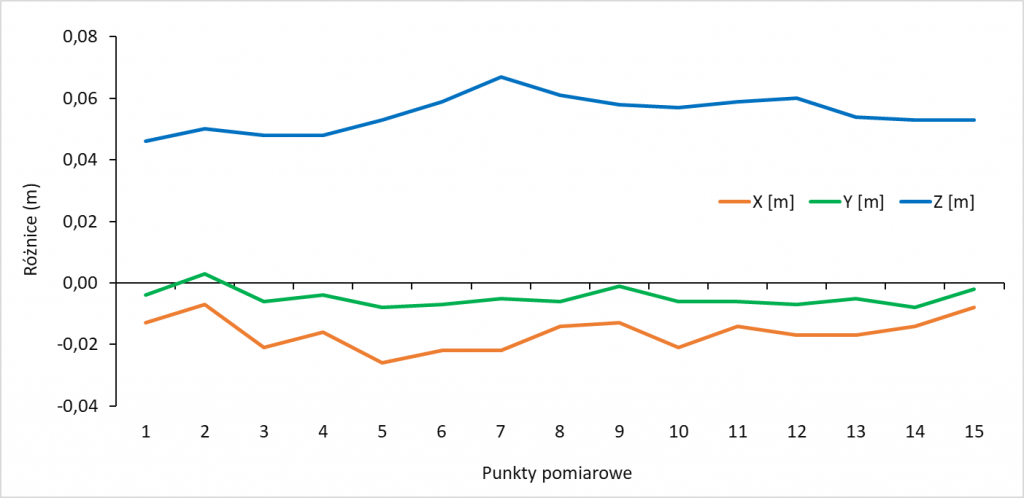
Ryc. 9. Różnice pomiędzy współrzędnymi pomierzonymi tachimetrem Focus 35, a współrzędnymi z pomiaru w chmurze na modelu wykonanym ze zdjęć iPhone 11 PRO z systemem viDOC RTK ROVER
Wyniki pomiaru na modelu (bez wskazywania punktów na zdjęciach) wykonanym przy użyciu iPhone + viDoc ROVER w środowisku Pix4Dcloud dały bardzo zbliżone rezultaty. Współrzędne pomiarów zawiera tabela nr 7, a błędy pomiaru w odniesieniu do pomiaru wykonanego tachimetrem Focus-35 zebrano na rycinie 9. Średni błąd RMSE na współrzędnych X i Y wyniósł 0,011 zaś na rzędnej wysokościowej 0,055.
Podsumowanie
Zaprezentowana w materiale technologia skanowania obiektów małogabarytowych przy użyciu ręcznego urządzenia typu iPhone wyposażonego w moduł RTK viDoc potwierdza jego użyteczność oraz uniwersalność, a zarazem wysoką dokładność tak często potrzebną w trakcie pomiarów terenowych zróżnicowanych obiektów. Jego unikalne zalety to głównie mały rozmiar, niewielka masa, poręczność, łatwość obsługi oraz gotowość do pracy natychmiast po uruchomieniu. W stosunku do tradycyjnych metod geodezyjnych posługiwanie się tak wszechstronnym urządzeniem daje duże możliwości, szczególnie, gdy konieczne jest pozyskanie informacji o obiektach w miejscach trudnodostępnych, lub tych, których widoczność jest ograniczona. Do najbardziej popularnych zastosowań ręcznego zestawu należą skanowanie postępów robót drogowych, kanalizacyjnych, robót konstrukcyjnych w budownictwie, prac prowadzonych poniżej poziomu terenu czy prac wewnątrz pomieszczeń. Walory sprzętu docenią badacze oraz archeolodzy w trakcie prowadzenia wykopalisk oraz rekonstrukcji fragmentów obiektów o ważnym dla historii i kultury znaczeniu. Informacje na ten temat można znaleźć w jednym z artykułów na naszym geoblogu: Drony w archeologii. W ostatnim czasie sensor LIDAR w iPhone znalazł również zastosowanie w pracach leśnych, mianowicie w analizie objętości drewna stosowanego do oceny miąższości surowca na składnicach oraz placach manipulacyjnych. Jak wskazują wstępne wyniki, to może być przełomowa metoda w usługach brakarskich.
Koszty zakupu zestawu
Cena viDoc RTK ROVER wynosi 5490 EUR netto, iPhone 12 PRO 3650 PLN netto, program komputerowy PIx4Dmapper 18 800 PLN netto, Pix4Dcloud STANDARD (opcja przetwarzania danych w chmurze) 8 000 PLN netto, poprawki NTRIP w serwisie RTN 1220 PLN netto.
Szczegóły znaleźć można na naszej stronie https://sklep.navigate.pl/index.php/bezzalogowe-statki-powietrzne-drony/kamery-do-dronow/vidoc-rtk-rover-szczegoly
Źródła
Pażus R. 2009. Spojrzenie na ASG-EUPOS od strony użytkownika serwisu POZGEO, Cz. I. Druga strona medalu. Mag. Geoinf. Geodeta 3(166), 28-30.
Królikowski J. Wywiał M, Durło G. 2022. Skaner spod strzechy. Mag. Geoinf. GEODETA (326), 7, 32-36.
Fotheringham M., Paudyal D. 2021. Combining terrestrial scanned datasets with UAV point clouds for mining operations. ISPRS Ann. Photog. Rem. Sens. Spat. Inf. Sci. DOI: V-4-2021. 129-138. 10.5194/isprs-annals-V-4-2021-129-2021.
Puniach E., Kwartnik-Pruc A. 2018. The use of laser scanning and unmanned aerial vehicles in construction surveying in the light of legal regulations in Poland. Jour. Appl. Eng. Sci. 8 (2), 79-88.
Mora O. E., Suleiman A., Chen J., Pluta D., Okubo M. H., Josenhans, R. 2019. Comparing sUAS photogrammetrically-derived point clouds with GNSS measurements and terrestrial laser scanning for topographic mapping. Drones, 3(3), 64 DOI: 10.3390/drones3030064
Materiały podglądowe
| Xiaomi 11 Lite budynek | https://cloud.pix4d.com/dataset/1135097/model?shareToken=8ce36ab9-8992-482d-bdb1-ab68d4b98e4f |
| Xiaomi 11 Lite stos drewna | https://cloud.pix4d.com/dataset/1159557/model?shareToken=31da7489-dc68-4de9-9cba-c111ad78264e |
| iPhone+viDOC wykop | https://cloud.pix4d.com/dataset/930987/model?shareToken=2a805511-4454-4ae9-bc95-05d9b1d042db |
| iPhone + viDOC budowa | https://cloud.pix4d.com/dataset/930983/model?shareToken=00669856-c22f-4b32-a440-519f6dea0009 |
O firmie NaviGate
Jeżeli myślisz o zastosowaniu bezzałogowych statków powietrznych lub innych systemów optycznych wykorzystywanych w fotogrametrii, teledetekcji lub skanowaniu LiDAR, u nas otrzymasz wszystko co potrzebne, by rozpocząć przygodę z nowoczesną technologią. Zdobędziesz Certyfikat Kompetencji Pilota SBSP w kategorii Szczególnej, dokonasz zakupu sprzętu i oprogramowania, zaś nasi instruktorzy wprowadzą Cię w specjalistyczne zagadnienia w trakcie szkoleń na różnym poziomie zaawansowania. Nasza firma dostarcza na rynek europejski wysokiej jakości rozwiązania pomiarowe Spectra Geospatial m.in. dla geodezji, leśnictwa, górnictwa, GIS oraz budownictwa. W ofercie znajdują się precyzyjne odbiorniki GNSS, tachimetry manualne zrobotyzowane, niwelatory, kontrolery, a także szeroki wybór oprogramowania terenowego i biurowego. Firma NaviGate jest autoryzowanym dystrybutorem DJI Enterprise, kamer wielospektralnych MicaSense, termowizyjnych kamer FLIR, optycznych sensorów Share UAV Technolog oraz średnio-formatowych kamer Phase One. NaviGate jest również autoryzowanym dystrybutorem oprogramowania z grupy Pix4D oraz 3Dsurvey. Pełna oferta znajduje się na naszej stronie www.navigate.pl. Informacje na temat szkoleń znajdą Państwo w witrynie Ośrodka Szkoleniowego NaviGate pod adresem www.szkolenia.navigate.pl.