Pomiary kinematyczne w postprocessingu (PPK) to metoda wykorzystująca dane globalnego systemu nawigacji satelitarnej (GNSS) do dokładnego określenia pozycji i trajektorii drona. PPK polega na zbieraniu surowych danych GNSS z drona, które w nawiązaniu do stacji referencyjnych o znanych współrzędnych umożliwią nam uzyskanie informacji o pozycji i trajektorii lotu drona po zakończeniu misji.
W tym materiale dowiesz się w jaki sposób uzyskać dokładne wyniki z drona DJI Enterprise. Artykuł jest tłumaczeniem artykułu „Complete PPK Workflow for DJI Enterprise Drones”, który znajduje się na stronie enterprise-insights.dji.com
PPK jest powszechnie stosowany w geodezji, kartografii i precyzyjnym rolnictwie, gdzie wysoka dokładność pozycjonowania jest kluczowa. W przeciwieństwie do pozycjonowania w czasie rzeczywistym kinematycznego (RTK), które wymaga bezprzewodowego połączenia w czasie rzeczywistym ze stacjami referencyjnymi, PPK można wykonać po pomiarze, co umożliwia większą elastyczność w zbieraniu danych. Możemy stosować go również w przypadkach, gdy metody RTK nie zdają egzaminu
Post-processing danych GNSS polega na wykorzystaniu specjalistycznego oprogramowania do przetwarzania surowych danych zbieranych przez odbiornik i porównywania ich z danymi z pobliskich stacji referencyjnych, aby określić dokładne położenie drona w określonym czasie. Ten proces może poprawić dokładność informacji o pozycji i trajektorii poprzez korekcję błędów wprowadzonych przez czynniki takie jak warunki atmosferyczne i odchylenia orbity satelitarnej.
Zarówno RTK jak i PPK może posłużyć do otrzymania dokładnych produktów fotogrametrycznych, jednakże istnieją pewne zalety stosowania PPK w stosunku do RTK:
| Zalety | Wady | |
| RTK |
Informacje o pozycji w czasie rzeczywistym: Dzięki RTK, otrzymujemy dokładne informację na temat pozycji drona podczas wykonywania nalotu, dzięki czemu jesteśmy wstanie zidentyfikować oraz rozwiązać problemy już podczas misji Szybka obróbka danych: Dzięki RTK uzyskujemy dokładne współrzędne środków rzutów w czasie rzeczywistym (już podczas nalotu), co pozwala na szybsze pozyskanie produktu końcowego. Przyjazny użytkownikowi: RTK jest zwykle łatwiejszy w użyciu niż PPK i wymaga mniejszych umiejętności do jego konfiguracji i obsługi. |
Mniejsza dokładność: Na dokładność RTK mogą mieć wpływ opóźnienia i przerwy w komunikacji, co czyni go mniej dokładnym oraz elestycznym niż PPK.
Zależność od komunikacji: RTK wymaga komunikacji w czasie rzeczywistym ze stacją referencyjną podczas misji, co może stanowić wyzwanie w odległych lub wiejskich obszarach o ograniczonym zasięgu sieci komórkowej lub jego braku, gdy korzysta się z RTK za pomocą protokołu NTRIP.
Wyższe koszty: RTK może być droższy niż PPK z powodu potrzeby dodatkowych modułów RTK lub opłat za subskrypcję usługi NTRIP. |
| PPK | Nie jest wymagana komunikacja z stacją referencyjną w czasie rzeczywistym: W przeciwieństwie do RTK, PPK nie wymaga komunikacji z stacją referencyjną w czasie rzeczywistym ponieważ dane korygujące są aplikowane później podczas obróbki w biurze po wykonanym nalocie
Większa elastyczność: W przypadku PPK, dron może wykonywać misję i zbierać dane, a obróbka może zostać przeprowadzona później, co zapewnia większą elastyczność w zbieraniu danych, zwłaszcza w obszarach o ograniczonym lub braku zasięgu sieci komórkowej.
Wyższa dokładność: Zarówno RTK i PPK zapewniają wysoką dokładność. Jednakże, PPK nie podlega opóźnieniom lub zakłóceniom komunikacyjnych podczas zbierania danych co może przełożyć się na dokładniejsze wyniki. Ponadto, dzięki PPK dane z anteny GNSS mogą zostać nawiązane do więcej niż jednej stacji referencyjnej co również poprawi dokładność wyznaczenia pozycji i trajektorii lotu drona.
Niższe koszty: PPK z reguły jest tańsze niż RTK, ponieważ nie wymaga zakupu dodatkowego sprzętu czy subskrypcji w celu uzyskania komunikacji w czasie rzeczywistym |
Dłuższy czas przetwarzania: Aby uzyskać dokładne dane o pozycji drona, konieczne jest dokonanie przetwarzania danych PPK w biurze, co może zająć trochę czasu i opóźnić dostarczenie końcowego produktu. Minimalny wymagany czas lotu: Aby uzyskać wystarczającą ilość surowych obserwacji danych GNSS podczas lotu, niezbędne jest przeprowadzenie misji o odpowiedniej długości i na odpowiedniej odległości. Oznacza to, że dron musi lecieć przez określony czas i dystans, aby zebrać wystarczającą liczbę surowych obserwacji GNSS do przetwarzania PPK. Dokładny czas i odległość zależny jest od od różnych czynników, takich jak użyty odbiornik GNSS, jakość danych z stacji referencyjnej i miejsce wykonania nalotu. Zazwyczaj zaleca się, aby minimalna długość nalotu nie była krótsza niż 10 minut, dzięki czemu otrzymamy wystarczającą ilość surowych danych GNSS do dokładnego wyznaczenia pozycji Jednak może to się różnić w zależności od konkretnych wymagań projektu nalotu i jakości zebranych danych GNSS. |
Wybór metody PPK lub RTK dla potrzeb nalotu zależy przede wszystkim od wymagań projektów, między innymi od elastyczności, kosztów i skali misji. Chociaż obie metody mają swoje zalety i wady, drony DJI Enterprise RTK zawsze rejestrują surowe dane satelitarne. Dzięki temu nawet jeśli niestabilne środowisko komunikacyjne zakłóci komunikację w czasie rzeczywistym podczas lotu RTK, użytkownik wciąż może pobrać dane z stacji bazowej i użyć metody PPK jako zapasowej, aby uzyskać dane o centymetrowe dokładności
Przygotowanie sprzętu i oprogramowania PPK
| Sprzęt UAV i ładunek (jedna z zaproponowanych opcji) | Matrice 300 RTK + Zenmuse P1
Matrice 300 RTK + Zenmuse L1 Mavic 3 Enterprise + RTK Module Mavic 3 Multispectral + RTK Module |
| Oprogramowanie do planowania misji lotu | Aplikacja DJI Pilot 2 |
| Źródło plików wymiany niezależnej bazy odbiornika (RINEX) i plików nawigacyjnych |
DJI D-RTK 2 Base Station Własna stacja bazowa (dane w formacie RINEX) NGS CORS (Online) – dane z Państwowych lub prywatnych stacji referencyjnych |
| Specjalistyczne oprogramowanie PPK (jedna z zaproponowanych opcji) |
Propeller Aero RTKLIB REDcatch REDtoolbox |
| Oprogramowanie fotogrametryczne | DJI Terra Oprogramowanie do fotogrametrii firm trzecich (np. Pix4DMapper czy 3DSurvey) |
Ogólny przebieg pracy
Wykonanie procesu PPK z wykorzystaniem danych surowych z drona oraz stacji referencyjnych może wydawać się trudne, ale w rzeczywistości jest to prosty proces, który wymaga jedynie odpowiedniego zaplanowania oraz wykonania. Proces ten składa się z kilku kluczowych kroków, które zostaną dokładniej omówione w instrukcjach poniżej:
- Ustawienie i przygotowanie: Przed rozpoczęciem zbierania surowych danych GNSS z drona, należy starannie zaplanować nalot. Wymagane jest upewnienie się, że czas trwania lotu jest wystarczająco długi oraz że w aplikacji DJI Pilot są włączone odpowiednie ustawienia. Staranne zaplanowanie misji sprawi, że zebrane zostanie wystarczająca ilość surowych dane do dokładnego przetwarzania PPK.
- Zbieranie danych z drona: Po zaplanowaniu misji nadszedł czas na zebranie danych obrazowych z drona oraz odpowiadających im danych GNSS z odbiornika drona podczas lotu. Dane GNSS powinny obejmować surowe dane nawigacji satelitarnej oraz informacje o czasie. Ważne jest, aby zebrać jak najwięcej danych, aby zapewnić dokładne przetwarzanie PPK.
- Zbieranie danych referencyjnych: Oprócz zbierania danych z drona, konieczne jest także zebranie danych referencyjnych z pobliskich stacji odniesienia GNSS, takich jak CORS (np. ASG EUPOS) lub innych odbiorników naziemnych. Dane referencyjne powinny zawierać te same sygnały GNSS (GPS, GLONASS, BeiDou itp.) i informacje o czasie co dane GNSS drona. Zebranie danych referencyjnych pozwala zapewnić, że wyniki PPK są jak najbardziej dokładne. Ważne jest, aby nasza stacja referencyjna miała dokładnie wyznaczone swoje współrzędne.
- Wyrównanie danych i przetwarzanie PPK: Po zebraniu wszystkich niezbędnych danych, należy wyrównać dane obrazowe z drona z odpowiadającymi im danymi GNSS na podstawie informacji o czasie. Można to zrobić za pomocą specjalistycznych narzędzi programowych, które potrafią dopasować informacje czasowe między zbiorem zdjęć a obserwacjami GNSS. Po wyrównaniu danych można przetworzyć je przy użyciu specjalistycznego oprogramowania PPK lub dostępnych usług internetowych. Przetwarzanie PPK wykorzystuje dane GNSS zarówno z odbiornika drona, jak i z stacji referencyjnej, aby obliczyć dokładne informacje o położeniu środka rzutów dla każdego zdjęcia wykonanego podczas lotu.
- Zapisanie informacji o środkach rzutów: Upewnij się, że nowe dane POS są poprawnie zaimportowane do oprogramowania fotogrametrycznego. Ten krok jest kluczowy, ponieważ dokładność modeli fotogrametrycznych zależy w dużej mierze od jakości danych wejściowych. Dlatego konieczne jest dwukrotne sprawdzenie zgodności danych POS z oprogramowaniem i upewnienie się, że zostały one poprawnie nadpisane.
Wykonanie procesu PPK z danymi obrazowymi drona może wydawać się złożone, ale jest to niezbędny proces do uzyskania dokładnych wyników fotogrametrycznych. Poprzez staranne zaplanowanie misji, zebranie wystarczającej ilości danych i wykonanie kontroli jakości, można zagwarantować, że wyniki będą jak najbardziej dokładne.
Ustawienia i przygotowania
Przed rozpoczęciem lotu dronem ważne jest prawidłowe skonfigurowanie aplikacji DJI Pilot 2. Oto kilka wskazówek, które pomogą w udanym locie:
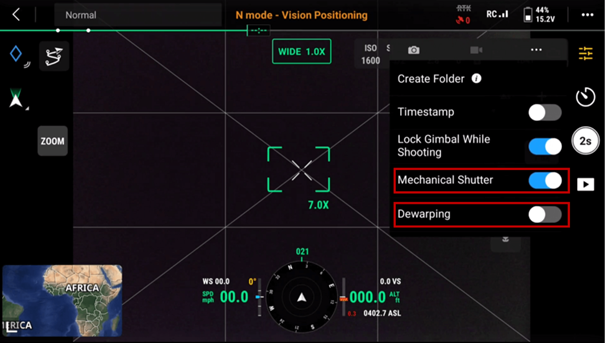
- Włącz opcję „Mechanical Shutter (Mechaniczna migawka umożliwia nam wykonywanie nie rozmytych zdjęć podczas nalotu z relatywnie szybką prędkością) i wyłącz opcję „Dewarping” (Wyłączenie korekcji obiektywu ”Rybie Oko” -> każde oprogramowanie fotogrametryczne usuwa dystorsję podczas obróbki, dlatego nie dobrą rzeczą jest powielanie tego procesu).
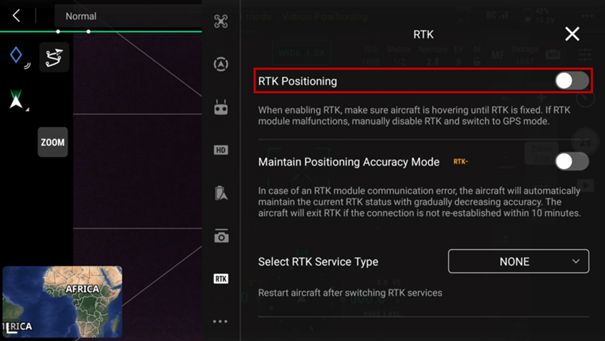
 2. Upewnij się, że opcja RTK jest wyłączona w ustawieniach aplikacji Pilot. Z włączoną opcją RTK, a bez komunikacji w czasie rzeczywistym z stacją bazową, dron po prostu nie wystartuje.
2. Upewnij się, że opcja RTK jest wyłączona w ustawieniach aplikacji Pilot. Z włączoną opcją RTK, a bez komunikacji w czasie rzeczywistym z stacją bazową, dron po prostu nie wystartuje.
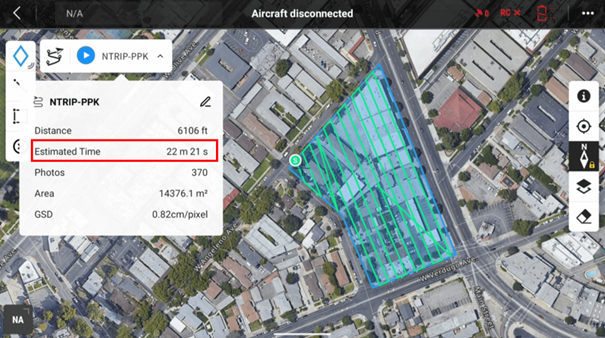
 3. Warto zaznaczyć, że proces PPK wymaga przetwarzania danych, co może potrwać pewien czas i opóźnić uzyskanie produktu finalnego. Ponadto, uzyskanie dokładnych danych pozycyjnych z PPK wymaga zbierania wystarczającej ilości surowych danych GNSS podczas lotu. Dokładny czas i odległość, jakie są wymagane, zależy od różnych czynników, takich jak użyty odbiornik GNSS, jakość danych stacji referencyjnych i miejsce wykonywania nalotu. Zazwyczaj zaleca się lot o minimalnym czasie 10 minut, aby zebrać wystarczającą ilość surowych danych GNSS do dokładnego przetwarzania PPK. W aplikacji Pilot można sprawdzić szacowany czas lotu w zakładce przeglądu misji.
3. Warto zaznaczyć, że proces PPK wymaga przetwarzania danych, co może potrwać pewien czas i opóźnić uzyskanie produktu finalnego. Ponadto, uzyskanie dokładnych danych pozycyjnych z PPK wymaga zbierania wystarczającej ilości surowych danych GNSS podczas lotu. Dokładny czas i odległość, jakie są wymagane, zależy od różnych czynników, takich jak użyty odbiornik GNSS, jakość danych stacji referencyjnych i miejsce wykonywania nalotu. Zazwyczaj zaleca się lot o minimalnym czasie 10 minut, aby zebrać wystarczającą ilość surowych danych GNSS do dokładnego przetwarzania PPK. W aplikacji Pilot można sprawdzić szacowany czas lotu w zakładce przeglądu misji.
Zbieranie danych z drona
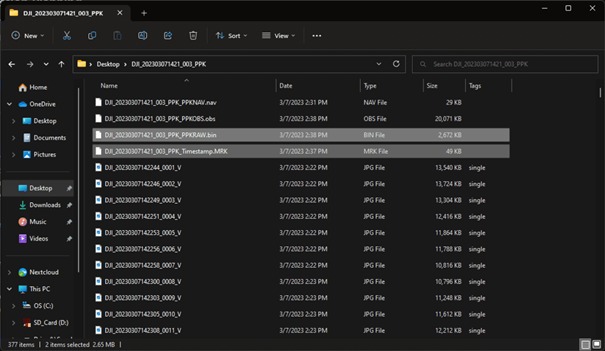
Aby właściwie przetworzyć dane metodą PPK, niezbędne są dane z drona. Oprócz surowych zdjęć, wymagane są dwa dodatkowe pliki z folderu z obrazami: plik z surowymi obserwacjami GNSS z drona w formacie RINEX oraz plik znaczników czasowych zdjęć.
Plik RINEX drona zawiera surowe pomiary GNSS, które są kluczowe dla uzyskania dokładnych środków rzutów zdjęć. Dane te służą do korekty błędów w sygnałach GNSS, które mogą wynikać z różnych czynników, takich jak warunki atmosferyczne i położenie satelit GPS. Bez tych danych dokładność metody PPK byłaby znacznie ograniczona. Plik RINEX o nazwie „XXX_PPKRAW.bin” znajduje się w folderze z surowymi zdjęciami.
Plik znaczników czasowych zdjęć jest kluczowy dla uzyskania dokładnych wyników. Ten plik rejestruje dokładny czas wykonania każdego zdjęcia, co jest niezbędne do poprawnego zsynchronizowania danych obrazowych z obserwacjami GNSS. Bez tych informacji dokładne wyrównanie danych obrazowych z danymi GNSS byłoby bardzo trudne, co z kolei negatywnie wpłynęłoby na dokładność końcowych wyników. Plik znaczników czasowych o nazwie „XXX_Timestamp.MRK” również znajduje się w folderze z surowymi zdjęciami.
Należy zadbać o to, aby te pliki były odpowiednio zbierane i przetwarzane, aby osiągnąć możliwie najwyższą dokładność metody PPK. Tylko kilka modeli dronów DJI Enterprise z RTK / PPK obsługuje te pliki, w tym:
DJI M300 RTK (tylko z sensorami Zenmuse P1 lub Zenmuse L1)
DJI Mavic 3 Enterprise (tylko z zamocowanym modułem RTK)
DJI Mavic 3 Multispectral (tylko z zamocowanym modułem RTK)
Zbieranie danych referencyjnych
Aby przeprowadzić przetwarzanie PPK (Post-Processed Kinematic) z użyciem stacji bazowej do danych referencyjnych, zwykle potrzebne są dwa rodzaje plików związanych z danymi GNSS (Global Navigation Satellite System): plik RINEX stacji bazowej i plik nawigacyjny:
- Plik RINEX stacji bazowej: Ten plik zawiera surowe dane GNSS zebrane przez stację bazową, zwykle w formacie RINEX. Plik RINEX stacji bazowej zawiera dokładne pomiary sygnałów satelitarnych, pozycji i informacji czasowych.Plik ten powinien zostać pozyskany w tym samym czasie co plik RINEX z drona. Plik RINEX stacji bazowej służy jako odniesienie do korygowania surowych danych GNSS zebranych przez drona podczas lotu.
- Plik nawigacyjny: Ten plik zawiera informacje o pozycji i orbicie satelitów GNSS widzianych podczas nalotu. Plik nawigacyjny jest używany przez oprogramowanie PPK do obliczania dokładnych informacji pozycyjnych dla każdego zdjęcia wykonanego podczas lotu drona. Plik nawigacyjny można uzyskać z różnych źródeł, np. z państwowego systemu stacji referencyjnych ASG_EUPOS
Jeśli w pobliżu nie występuje żadna stacja CORS od np. ASG-EUPOS (do 10 km najlepiej) dobrym rozwiązaniem wykorzystanie własnej stacji referencyjnej, tj. np. mobilna stacja DJI D-RTK 2 lub inny, dowolny odbiornik który umożliwia rejestracje surowych danych w formacje RINEX. Ważne jest, aby dla własnej stacji referencyjnej wyznaczyć lub znać dokładne współrzędne XYZ.
Jeśli wykorzystujemy mobilną stacją referencyjną D-RTK 2 to musimy znać współrzędne stacji w formacje WGS84 wraz z wysokościami elipsoidalnymi w metrach. Następnie w aplikacji Pilot 2 należy wpisać offset odbiornika od punktu referencyjnego (wpisać wysokość od punktu do spodu odbiornika). Po scentrowaniu stacji D-RTK 2 nad naszym punktem należy ją włączyć kilka minut przed lotem oraz pozostawić chwilę po wykonanym nalocie, tak aby pracowała cały czas podczas nalotu. Podczas stosowania innego odbiornika również należy włączyć zbieranie obserwacji surowych kilka minut przed lotem oraz pozostawić na chwilę po wylądowaniu, Ważne jest, aby taka stacja znajdowała się centralnie nad punktem oraz nie ulegała przesunięciu czy przechylenie podczas nalotu, gdyż może to zakłócić zbieranie surowych danych z powodu zmiany pozycji stacji. Po zakończeniu lotu podłącz stację bazową D-RTK2 do komputera za pomocą kabla USB-C i wyeksportuj pliki formatu .dat RTCM (Radio Technical Commission for Maritime) zarejestrowane po locie. Korzystając z stacji mobilnej DJI D-RTK 2, możesz uniknąć konieczności dokupywania dodatkowego sprzętu i opłat za subskrypcję, które mogą być wymagane do komunikacji w czasie rzeczywistym. Proces PPK staje się w ten sposób bardziej opłacalny i oferuje większą elastyczność zbierania danych, zwłaszcza w obszarach o ograniczonej lub brakującej zasięgowości komórkowej.
A jeśli chciałbyś dowiedzieć się jak wygląda cały proces PPK, śmiało skontaktuj się z nami! Nasi specjaliści poinstruują Cię krok po kroku jak uzyskać jak najlepsze dokładności!