Informacje wstępne:
| Wykonawcy: | Grzegorz Durło |
| Misja SBSP: | Grzegorz Durło |
| Pomiary GNSS: | Jacek Jester – Specjalista SL ds. informatyki i LMN, Nadleśnictwo Osusznica |
| Cel: | pomiar powierzchni gniazd |
| Data i miejsce wykonania lotu/pomiarów: | 08-11-2022, 25-11-2022 |
| Lokalizacja: | Nadleśnictwo Osusznica, Leśnictwo Kiedrowice, Oddział 230, wydzielenie f |
| Rejon lotu: | 10,0 ha |
| Sprzęt: | UAV DJI Mavic 3 Enterprise RTK, smartfon Samsung Galaxy, odbiornik GNSS Trimble PRO 6H |
| Oprogramowanie: | DJI Pilot2, Pix4Dmapper, QGIS 3.16, mLas 8.0 |
Wstęp
Szkice sytuacyjne (lokalizacyjne) w leśnictwie stanowią ważny element inwentaryzacji obiektów leśnych. Wykorzystywane są zazwyczaj jako materiały do aktualizacji leśnej mapy numerycznej (LMN) oraz do weryfikacji stanu posiadania. Zważywszy na różnorodność form terenu, typów zbiorowisk leśnych, struktury administracyjnej oraz działań gospodarczych przygotowanie szczegółu sytuacyjnego wymaga gruntownej wiedzy na temat metod sporządzania dokumentacji. Standard LMN nie określa wprawdzie dokładności wyznaczania obiektów, nie określa również sposobów pozyskania informacji o ich atrybutach. Należy jednak zauważyć, że szkice stanowią podstawowy dokument zdarzeń gospodarczych. O ich wartości decyduje jakość pomiaru, kompletność opisu oraz aktualność, tj. zgodność z rzeczywistymi warunkami terenowymi [Zarz. Nr 74 Dyr. Gen. PGL LP 2001, aktualizacja 2011 rozdz. VII IUL, Brach 2008]. Dostępne do niedawna środki techniczne stosowane w terenie, takie jak klasyczne pomiary geodezyjne oraz systemy nawigacji satelitarnej, dziś uzupełniają bezzałogowe systemy latające (UAV/UAS) potocznie zwane dronami. Współczesne bezzałogowe statki dysponują dużym potencjałem w zakresie gromadzenia i przetwarzania informacji wykorzystywanych do bezpośredniego zarządzania na obszarach leśnych. Dzięki zaawansowanym sensorom optycznym zdjęcia wykonywane na niskim pułapie do 150 m AGL pozwalają na zapis najdrobniejszych szczegółów kształtu powierzchni oraz cech geometrycznych obiektów znajdujących się na ziemi, w tym także roślin. W poniższym materiale zaprezentowano wyniki obliczeń powierzchni gniazd przy użyciu klasycznych pomiarów naziemnych oraz danych pochodzących z systemu bezzałogowego.
Lokalizacja obiektu
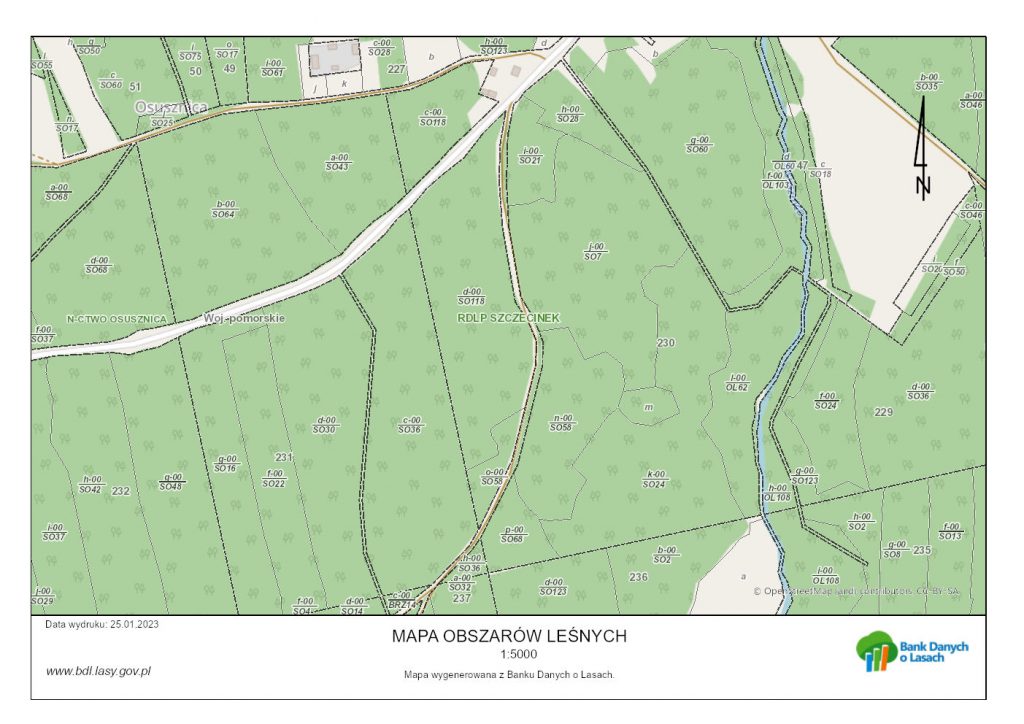
Nadleśnictwo Osusznica, Obręb Osusznica, Leśnictwo Kiedrowice, oddział 230f, GPZ. Gatunek panujący: sosna pospolita 100%, miejscowo buk zwyczajny, dąb szypułkowy, sosna pospolita, brzoza brodawkowata, topola osika, klon zwyczajny, pojedynczo kruszyna pospolita, świerk pospolity, jarząb pospolity, brzoza brodawkowata. Przeciętna wysokość drzewostanu panującego w sąsiedztwie powierzchni zrębowej wynosi 25,2 m. Obiekt położony jest w pobliżu drogi krajowej numer 2012 w miejscowości Osusznica, na lekko opadającym ku północy zboczu o spadku 2,6% (ryc. 1, fot. 1).

Przebieg misji
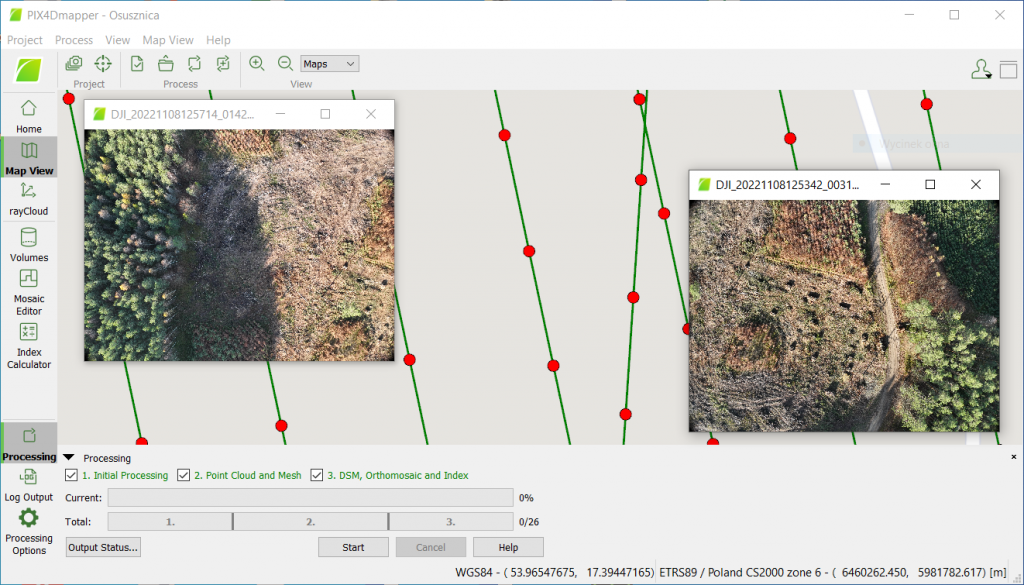
Misję wykonano przy użyciu bezzałogowego statku powietrznego DJI Mavic 3 Enterprise wyposażonego w moduł RTK. W trakcie misji korzystano z poprawek w formacie RTCM dostarczanych przez serwis ASG-EUPOS. Trasę lotu zaplanowano w aplikacji DJI Pilot 2 zgodnie z następującymi parametrami: wysokość lotu 100 m AGL, prędkość pozioma 10,9 m·s-1, stabilizacja GPS/GNSS, FO/SO 83%. Ustawienia kamery: CO Landscape; GSD 2,67; liczba zdjęć zapisanych na karcie mSD 215. Warunki meteorologiczne w trakcie misji: słonecznie, temperatura powietrza 12ᶹC, wilgotność powietrza 75%, zachmurzenie ogólne nieba 1,0 Okt, prędkość wiatru 10 m AGL 1,6 m·s-1, widoczność pozioma 15 km, powierzchnia czynna sucha.


Pomiary terenowe
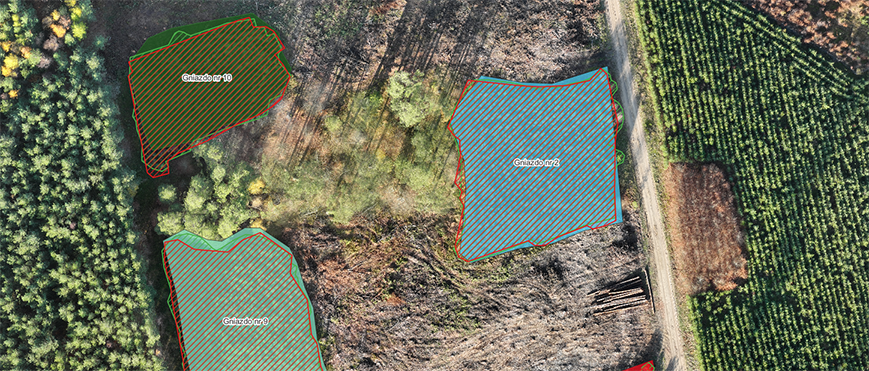
Serię pomiarów naziemnych wykonano przy użyciu precyzyjnego odbiornika Trimble PRO Pathfinder wersja 6H na tyczce z libellą oraz rejestratorem, którego funkcję pełnił smartfon z systemem Android. Na smartfonie zainstalowano narzędzie mapowe mLAS 8.0. Wyniki pomiarów uzyskano przez uśrednienie 10 s na każdym punkcie (Tab. 1). W trakcie pomiarów nie korzystano z poprawek RTCM (serwis ASG-EUPOS). Pomiar prowadzono w kolejności usytuowania obiektów od północno-wschodniej części wydzielenia ku południowi oraz od południa w stronę północno-zachodnią (dwa szeregi). Wyznaczono tą metodą 10 gniazd o łącznej powierzchni 1,316 ha. Kształt gniazd był dość regularny z jednym wyjątkiem (gniazdo nr 3), a do wykonania szkicu użyto łącznie 145 punktów pomiarowych. Pomiary wykonywano w punktach węzłowych gniazd zachowując kierunek tyczenia: przeciwnie do ruchu wskazówek zegara.
Tabela 1. Przykładowy zestaw danych z pomiarów naziemnych na powierzchni zrębu w oddziale 230f (Leśnictwo Kiedrowice) przy użyciu odbiornika GNSS Trimble 6H
| Lp. | Oznaczenie | X | Y |
| 1 | Pkt_0 | 394705.58651422340 | 679265.4931550901 |
| 2 | Pkt_1 | 394707.80717486130 | 679215.4621013820 |
| 3 | Pkt_2 | 394699.59252830110 | 679211.2902271186 |
| 4 | Pkt_3 | 394691.35117683763 | 679212.4043068963 |
| 5 | Pkt_4 | 394674.16291225610 | 679208.3988315226 |
| 6 | Pkt_5 | 394668.28668417630 | 679212.4524945602 |
| 7 | Pkt_6 | 394667.14848016686 | 679224.9943496542 |
| 8 | Pkt_7 | 394666.85277882480 | 679239.8259581034 |
| 9 | Pkt_8 | 394679.10742790264 | 679253.7257686736 |
| 10 | Pkt_9 | 394686.47153196257 | 679259.2094774046 |
| 11 | Pkt_10 | 394705.58651422340 | 679265.4931550901 |
| 12 | Pkt_11 | 394705.58651422340 | 679265.4931550901 |
Opracowanie materiału zdjęciowego
Opracowanie wykonano na komputerze DELL Vostro P71F w aplikacji Pix4Dmapper ver. 4.7.5. Średnia wartość wskaźnika jakości zdjęć EIQ wyniosła 0,91 (±0,020); liczba zdjęć wyrównanych 215 (100%); całkowity czas opracowania wyniósł 55 min. Kolejne etapy analizy, tj. wyrównanie bloku zdjęć, generowanie chmury punktów oraz modeli DSM i DTM i na końcu ortofotomozaiki zabrały łącznie 55 minut. Gotowe produkty wykorzystano jako podkłady do digitalizacji poligonów oraz obliczenia ich powierzchni.


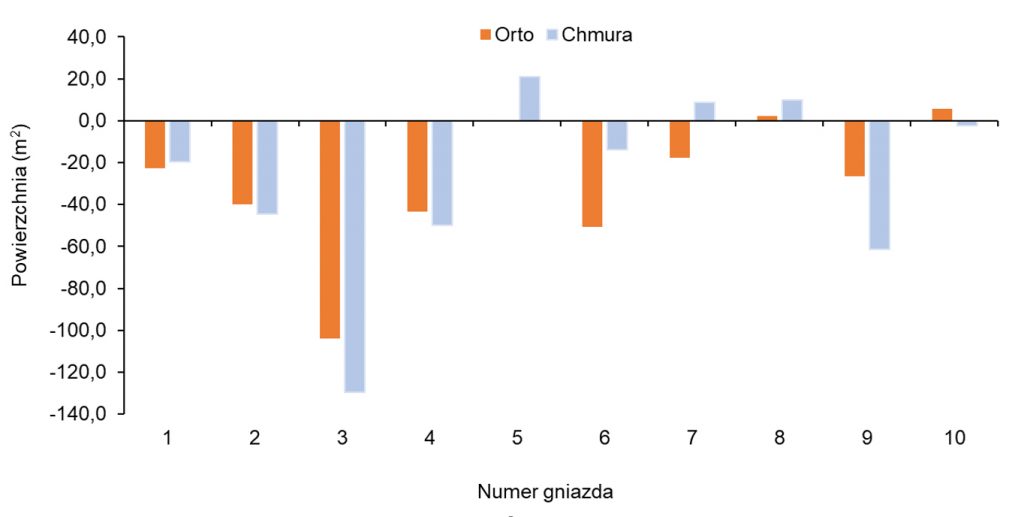
Suma powierzchni gniazd wyznaczonych metodą tradycyjną z użyciem naziemnego odbiornika GNSS wyniosła 13156,623 m2. Ta sama powierzchnia obliczona na podstawie danych z chmury punktów wyniosła 12879,343 m2, natomiast łączna powierzchnia poligonów wkreślonych w ortofotomozaikę wyniosła 12860,852 m2. Przeciętna różnica pomiędzy danymi z tyczenia a pomiarami na produktach fotogrametrycznych wyniosła 31 m2 na pojedynczy obiekt, co stanowi zaledwie 2,3%. Najmniejsze różnice wynosiły poniżej 3 m2 (gniazdo nr 8), największe sięgały 120 m2 (gniazdo nr 3). W tym ostatnim przypadku można przyjąć, że powodem tych rozbieżności były warunki terenowe i trudności w dostępie do miejsc wyznaczających granicę pomiędzy gniazdem i powierzchnią otwartą. Natomiast, przeciętna różnica pomiędzy powierzchnią gniazd wyznaczoną w oparciu o ortofotomozaikę oraz chmurę punktów wyniosła 17 m2 z odchyleniem standardowym 12 m2 (Tab. 2).
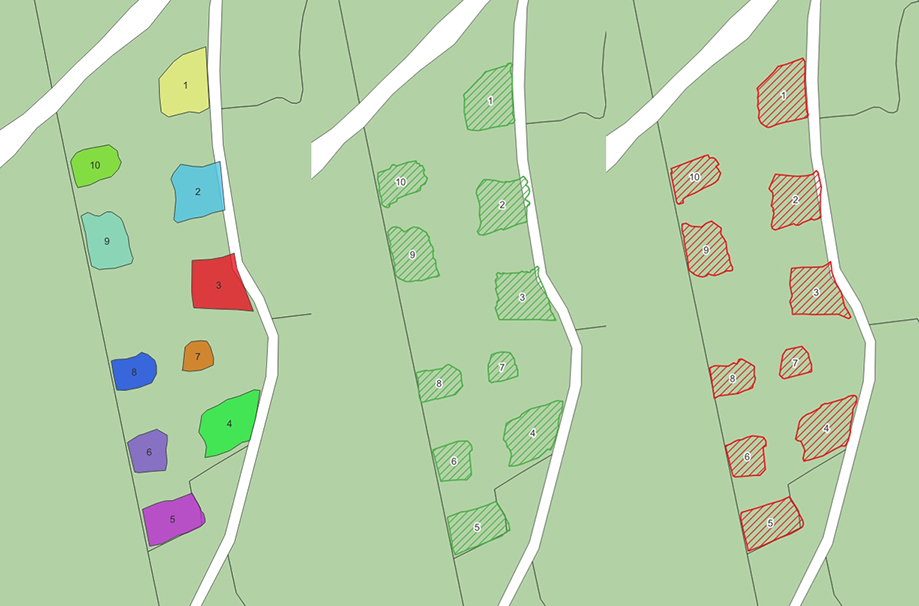
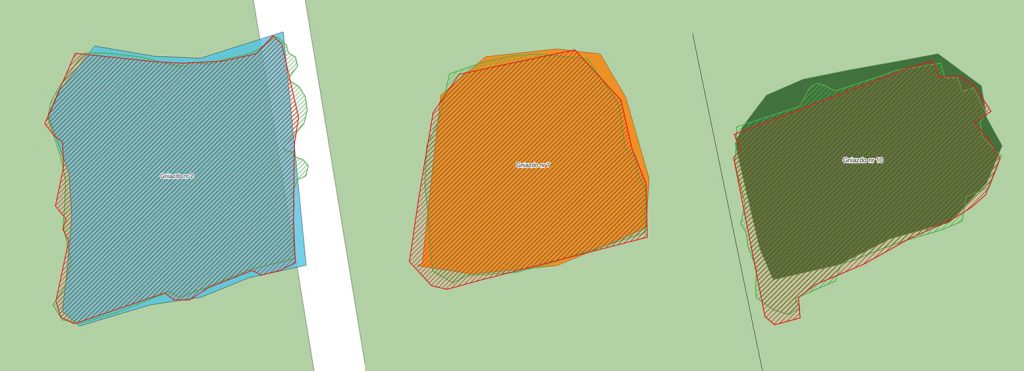
Tabela 2. Powierzchnia gniazd (m2) wyznaczonych różnymi metodami w oddziale 230f (Leśn. Kiedrowice, Nadl. Osusznica, stan na rok 2022)
| Nr_gniazda | Ręcznie (Antena GNSS Trimble) |
Ortofotomapa (DJI Mavic 3E) |
Chmura punktów (Pix4Dmapper v. 4.7.5) |
| 1 | 1792,325 | 1769,783 | 1772,746 |
| 2 | 1680,095 | 1640,345 | 1635,738 |
| 3 | 1755,699 | 1651,900 | 1626,131 |
| 4 | 1748,830 | 1705,591 | 1698,846 |
| 5 | 1410,123 | 1410,254 | 1431,076 |
| 6 | 915,638 | 865,094 | 905,803 |
| 7 | 518,141 | 500,379 | 526,874 |
| 8 | 855,744 | 858,158 | 865,683 |
| 9 | 1476,016 | 1449,616 | 1414,737 |
| 10 | 1004,012 | 1009,732 | 1001,709 |
Podsumowanie
W przedstawionym materiale porównano metody wyznaczania powierzchni gniazd na zrębie. W pierwszym przypadku, tradycyjny szkic wykonany przez specjalistę opierał się na pomiarze naziemnym z użyciem odbiornika wyposażonego w antenę GNSS Trimble PRO 6H. Pomijając przemieszczanie się po zrębie ze sprzętem czas na wyznaczenie powierzchni węzłów wszystkich poligonów wyniósł około 27 minut. Cała procedura zajęła niespełna 2 godziny. Część analityczna polegająca na przeniesieniu danych z rejestratora do komputera, następnie uzupełnienie danych poligonowych atrybutami geometrii i w końcu podsumowanie wyników zajęło łącznie kwadrans. Przygotowanie warstwy wektorowej wyróżnionych obiektów wraz z tabelą atrybutów w formacie LMN zajęło 10 minut. Te same czynności z użyciem platformy bezzałogowej zajęły odpowiednio: 6,5 min czas lotu, przygotowanie produktów fotogrametrycznych 55 minut. Prace kameralne polegające na wykreśleniu poligonów na ortofotomapie zajęły 10 minut, wskazanie punktów na zdjęciach w celu dokładnego wyznaczenia poligonów na chmurze punktów 25 minut, i na końcu przygotowanie warstwy wektorowej (multipoligon) wraz z tabelą atrybutów trwało 5 minut.
Podsumowując, pierwsza metoda to łącznie 110 minut, czas potrzebny do uzyskania informacji na temat powierzchni gniazd o całkowitym areale 1,32 ha. W metodzie fotogrametrycznej 100 minut to czas na uzyskanie informacji na temat: cech geometrycznych całego wydzielenia tj. 5.25 ha, ponadto, powierzchni gniazd, współrzędnych punktów węzłowych (X, Y, Z), modelu DSM oraz modelu DTM wraz z atrybutami, ortofotomozaiki barwnej, mapy hipsometrycznej, wysokości drzew i na koniec raport zawierający informacje na temat dokładności wykonanych obliczeń.
Wszystkie opisane wyżej metody pozwalają na wyznaczenie powierzchni obiektów leśnych z wymaganą dokładnością, jednakże w przypadku dwóch ostatnich (pomiary na ortofotomapie oraz wskazanie punktów w chmurze) nie ma konieczności wykonywania pomiarów ręcznie, a jedynie na gotowych produktach fotogrametrycznych. Mając na uwadze zasób informacji zgromadzony w oparciu o dane z systemu bezzałogowego można śmiało stwierdzić, że uzyskanie podobnych danych metodami tradycyjnymi, np. ciągów tachimetrycznych czy danych o wysokości terenu oraz wysokości obiektów, zajęłoby w tym przypadku co najmniej 2 dni, do tego prace te należałoby wykonać w zespole dwuosobowym. Przewaga technologiczna systemów bezzałogowych wyposażonych w wysokiej rozdzielczości sensory optyczne wydaje się bezdyskusyjna, zaś wyniki pomiarów w pełni odpowiadają standardom LMN.
Wnioski
W oparciu o uzyskane wyniki można stwierdzić, że zasób informacji uzyskany przy użyciu systemu bezzałogowego jest bez wątpienia znacznie większy od tego, jaki można zgromadzić za pomocą narzędzi tradycyjnych. Obiektywność metody, zarówno jeśli chodzi o sposób pozyskania informacji o atrybutach obiektów, jak i dalsze etapy analizy również przemawia na korzyść technologii bezzałogowej – przy wsparciu środowiska fotogrametrycznego.
Analiza zgromadzonego materiału potwierdziła także, że wyniki pomiarów naziemnych są nieznacznie zawyżone w stosunku do rezultatów uzyskanych w oparciu o materiał fotogrametryczny. Wykraczając poza główny wątek opracowania, można przyjąć, że powodem rozbieżności są ograniczone możliwości poruszania się w terenie, szczególnie jeśli chodzi o rejony o zróżnicowanej topografii, znacznych deniwelacjach oraz niekorzystnych warunkach środowiskowych. Ten ostatni element znajduje potwierdzenie w dokładności wyznaczania współrzędnych punktów z uwagi na rolę przesłon terenowych (znaczna wysokość topocentryczna). Wysokość lotu statku bezzałogowego zazwyczaj od 100 do 150 m AGL częściowo rozwiązuje ten problem, choć w terenach górskich nie zawsze znajduje to potwierdzenie w jakości odwzorowania.
Literatura
Brach M. 2008. Współczesne możliwości pomiaru szczegółów sytuacyjnych w przestrzeni leśnej. Rocz. Geom. 6, Zesz. 8. Wyd. PTIP Warszawa.
Zarządzenie nr 74 Dyrektora Generalnego Lasów Państwowych z dnia 23 sierpnia 2001. Standard Leśnej Mapy Numerycznej. Aktualizacja SLMN z dnia 31 lipca 2005.