W miarę rosnącego zapotrzebowania na pozyskiwanie danych obrazowych z niskiego pułapu firma DJI wypuściła na rynek Matrice 300 RTK z pełnoklatkową kamerą Zenmuse P1. Czy ten zestaw będzie godnym zastępcą najbardziej popularnego drona do zastosowań geodezyjnych jakim stał się Phantom 4 RTK? W tym artykule postaram się przybliżyć specyfikację obu urządzeń oraz porównać je pod względem dokładności oraz wydajności.

Specyfikacja
Porównanie zacznę od zestawienia specyfikacji Phantoma 4 RTK do zestawu Matrice 300 RTK & Zenmuse P1 w formie tabelarycznej:
| DJI Phantom 4 RTK | DJI Zenmuse P1 | |
| Masa | 1,5 kg | 0,9 kg + 6,3 kg = 7,2 kg (P1 + M300RTK) |
|---|---|---|
| Długość ogniskowej obiektywu |
rzeczywista – 8,8 mm ekwiwalent na pełną klatkę – 24 mm |
24 mm 35 mm 50 mm |
| Kąt widzenia obiektywu | 84° | 84° / 63,5° / 46,8° |
| Rozmiar matrycy | 1″(13,2 x 8,8 mm) | pełna klatka (36 x 24 mm) |
| Rozdzielczość matrycy | 20 MP (5472×3648 pix) | 45 MP (8192×5460 pix) |
| Rozmiar piksela matrycy | 2,4 μm | 4,4 μm |
| Piksel terenowy (GSD) dla 120 AGL |
3,3 cm | 2,2 cm (obiektywy 24 mm) 1,5 cm (obiektywy 35 mm) 1,1 cm (obiektywy 50 mm) |
| Min. interwał zdjęć | 2,5 s | 0,7 s |
tab. 1. Porównanie specyfikacji
Masa statku
Masa platformy Phantom 4 RTK to niecałe 1,5 kg, co pozwala na wykonywanie lotów w kategorii szczególnej w scenariuszu NSTS-01. W przypadku Matrice 300 RTK przekraczamy masę 4 kg i operacje musimy wykonywać w ramach scenariusza NSTS-02 lub NSTS-06, jeżeli loty odbywają się poza zasięgiem wzroku. Cieszyć mogą się posiadacze świadectwa kwalifikacji UAVO do 5 kg, którzy po zmianie przepisów nieco zyskali i po wykonaniu konwersji mogą pilotować statki typu MR MTOM < 25 kg.
Kamera
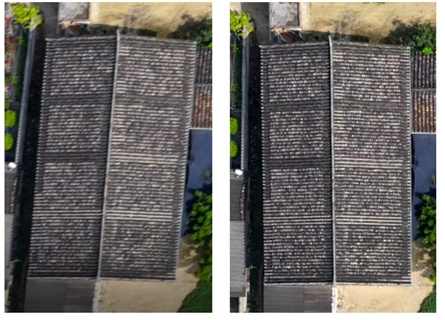
W Phantomie 4 RTK mamy do dyspozycji jedną kamerę RGB (model: FC6310R) o 1-calowej matrycy, ogniskowej 8,8 mm i rozdzielczości 20 MP, bez możliwości wymiany. W przypadku Zenmuse P1 mamy już matrycę pełnoklatkową (ang. full frame) o rozdzielczości 45 MP i na dodatek możemy wymieniać obiektywy. Do wyboru mamy „szkła” o długościach ogniskowych równych 24, 35 i 50 mm. Sam fakt, że powierzchnie obu matryc różnią się aż 7-krotnie, powinno nam uzmysłowić o różnicy klas obu kamer. Jeżeli jednak chodzi o rozmiar piksela terenowego na wysokości lotu 120 m AGL, to w przypadku Phantoma 4 RTK wynosi on 3.3 cm, a dla Zenmuse P1 odpowiednio 2,2 cm, 1,5 cm i 1,1 cm dla obiektywów o ogniskowych 25, 35 i 50 mm. Następnym piekielnie ważnym parametrem, z fotogrametrycznego punktu widzenia jest typ migawki. Jedynym sensowym rozwiązaniem przy tej klasie aparatu jest migawka globalna (ang. global-shutter). Migawka global shutter pozwala naświetlać cała matrycę w momencie ekspozycji zdjęcia. Natomiast migawka szczelinowa naświetla jedynie wąski fragment matrycy, który przemieszcza się z góry na dół. Powoduje to tzw. efekt rolling-shutter (ryc. 2). Widoczny on jest na fotogrametrycznych zdjęciach z pokładu bezzałogowców, kiedy statek przemieszcza się z duża prędkością w trakcie eksplozji zdjęć. Objawia się on „kładzeniem obiektów” na zdjęciach. W przypadku migawki globalnej, mamy ten problem z głowy.
W Phantom 4 RTK zastosowano klasyczną migawkę mechaniczną, która co prawda również redukuje efekt rolling-shutter, ale jej zasada działania jest zgoła inna. Ostatnia rzecz, na którą warto zwrócić uwagę, to minimalny interwał pomiędzy zapisem kolejnych zdjęć. Phantom potrzebował aż 2,5 sekundy, a w przypadku kamery Zenmuse P1 interwał wynosi jedynie 0,7 sekundy. Wszystkie powyższe cechy pozwalają na lot na znacznie większej wysokości i z większą prędkością, co bezpośrednio przekłada się na wydajność. Jest ona 5-krotnie większa w przypadku zdjęć nadirowych i do 10 razy większa, gdy wykonujemy zdjęcia ukośne. Rzeczą wspólną dla obu kamer jest ich integracja na 3-osiowym gimbalu, z tą różnicą, że kamera Zenmuse P1 wyposażona jest w złącze DJI SkyPort, co pozwala w mgnieniu oka podłączyć kamerę do platformy latającej np. Matrice 300 RTK. Dzięki gimbalowi oraz wyspecjalizowanemu algorytmowi „Smart Obliqe” kamera Zenmuse P1 ma możliwość zmiany kąta wykonywanych zdjęć w trakcie lotu. Więcej o tym trybie w dalszej części artykułu.
Aplikacja
Phantom 4 RTK jest wyposażony w dedykowaną aplikację DJI GS RTK. Jest ona podzielona na dwa moduły: moduł manualnego lotu oraz planowania misji autonomicznych (ryc. 3). Nalot możemy zaplanować na 8 sposobów, w zależności od produktu jaki chcemy uzyskać, lub od zróżnicowania obszaru opracowania. Zastosowanie każdej z misji opisane jest w tab. 2.
| Metoda | Dedykowane przeznaczenie | Rodzaj zdjęć |
| 2D Photogrammetry | Ortofotomozaiki oraz NMPT/NMT | Pionowe |
| 3D Photogrammetry (Double Grid) |
Chmury punktów oraz modele 3D | Ukośne |
| Waypoint Flight | Przelot po zaplanowanej ścieżce | Dowolne |
| Linear Flight Mision | Ortofotomapy i NMPT dla obiektów wydłużonych (autostrady, linie kolejowe itp.) |
Pionowe |
| 3D Photogrammetry (Multi-oriented) |
Bardzo dokładne chmury punktów oraz modele 3D. Misja składa się 5 części. W pierwszej wykonuje się zdjęcia pionowe, w pozostałych 4 zdjęcia ukośne z każdej strony obiektu. |
Pionowe + ukośne |
| Terrain Awareness Mode | Loty w terenach o dużej deniwelacji. Możliwość ustawienia wysokości nalotu w odniesieniu do wysokości z NMT. |
Pionowe lub ukośne |
| Linear Flight (Adjustable Height) |
Nalot liniowy ze zmianami wysokości nalotu | Pionowe |
| Angled Flight Route | Ortofotoplany elewacji budynków | Poziome |
tab. 2. Rodzaje misji autonomicznych w DJI GS RTK
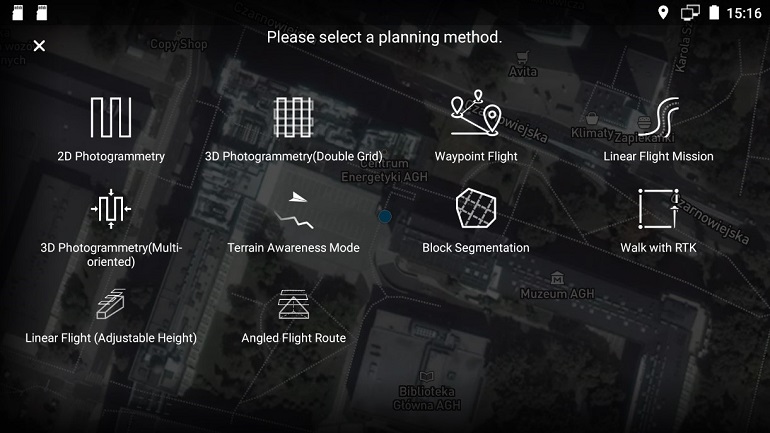
W zestawie Matrice 300 RTK z kamerą Zenmuse P1 użytkownik otrzymuje dedykowaną aplikację do planowania misji o nazwie DJI Pilot (ryc. 4). Jest ona dostarczana w pakiecie z dronem. Jeżeli ktoś chce ją przetestować przed zakupem całego zestawu można ją pobrać za darmo na urządzenie mobilne z systemem Android lub spotkać się ze sprzedawcą NaviGate na prezentację sprzętu. Za jej pośrednictwem można również wykonywać misje starszymi statkami np. Phantom 4 Pro lub całą serią Matrice 200 (Matrice 200 V2, Matrice 210 V2, Matrice 210 V2 RTK).
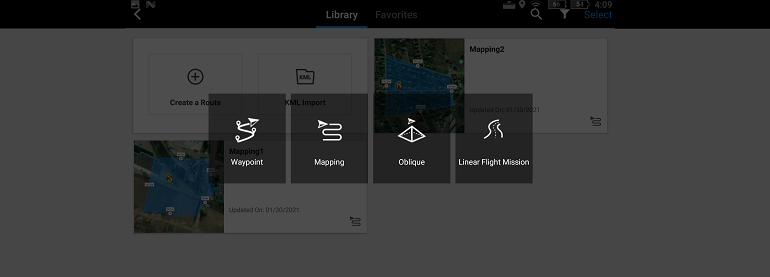
Przejdźmy do rodzajów misji, które oferuje powyższa aplikacja. Opcja „Waypoint” służy do zaprogramowania ścieżki nalotu po zadanych punktach. Najczęściej jest ona wykorzystywana do nalotów inspekcyjnych. Do nalotów fotogrametrycznych służą pozostałe trzy tryby. Za pomocą trybu „Mapping” wykonamy zdjęcia pionowe, z których później możemy stworzyć ortofotomozaikę. Tutaj również zamieszczona jest funkcja „Smart Obliqe”. Kolejny tryb „Obliqe” to klasyczne wykonywanie zdjęć ukośnych (taki sam tryb jak Multi Oriented w GS RTK), który obecnie rzadko będzie wykorzystywany, ze względu na obecność Smart Obliqe. Ostatni tryb misji, który nazywa się „Linear Flight Mission”, jak sama nazwa wskazuje, służy do wykonywania nalotów liniowych. Najczęściej wykorzystuje się tę opcję przy nalotach liniowych nad drogami, ciekami wodnymi czy napowietrznymi liniami energetycznymi. Oprócz tego, użytkownik ma do dyspozycji tryb lotu manualnego.
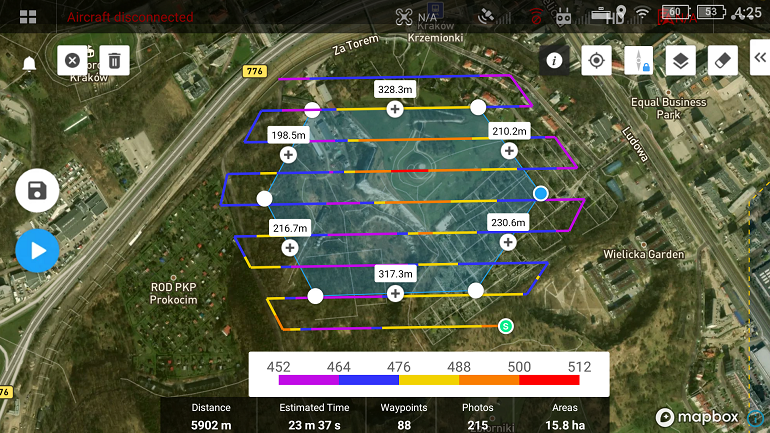
Tak jak w aplikacji DJI GS RTK, w DJI Pilot użytkownik ma możliwość określenia obszaru opracowania ręcznie na podkładzie satelitarnym lub importu gotowej osi lub poligonu za pomocą pliku *.kml stworzonego wcześniej np. w aplikacji Google Earth. Nalot nad obszarem o dużych deniwelacjach terenu również nie będzie problemem, ponieważ mamy możliwość wczytania NMT, który pozyskamy z Geoportalu krajowego (ryc. 5).