Wykonano ocenę stanu uprawy kukurydzy na glebie brunatnej o wysokiej przydatności rolniczej III klasy bonitacji w gminie Zielonki (powiat krakowski) zlokalizowanej w województwie małopolskim. Analizę przeprowadzono w oparciu o informacje zawarte na mapach reflektancji opracowanych w kanałach widmowych B, G, R, RedEdge, NIR, oraz na mapie RGB.
Informacje wstępne:
| Wykonawca: | Grzegorz Durło |
| Operator UAV/UAS: | Grzegorz Durło |
| Cel 1: | Ocena sprawności operacyjnej platformy latającej, cechy użytkowe aplikacji mobilnej oraz oprogramowania fotogrametrycznego |
| Cel 2: | Wykonanie kompozycji barwnej NDVI, LCI, NDRE, GNDVI nad uprawą kukurydzy |
| Data i miejsce wykonania nalotu: | 19-09-2019; Gmina Zielonki, Obręb Bibice, powiat krakowski, woj. Małopolskie, rejon ulicy Królewskiej oraz Zboczowej, zlewnia potoku Bibiczanki |
| Powierzchnia opracowania: | 11,8 ha |
| Sprzęt: | UAV DJI Phantom 4 Multispectral, kamera DJI FC6360 |
| Oprogramowanie: | DJI GSP PRO, DJI Terra |
1. Wstęp
Rynek usług w zakresie rolnictwa precyzyjnego wspomagany nowoczesnymi technologiami UAV/UAS sprawił, że wiele firm wprowadziło do swych ofert sprzęt dedykowany jako specjalne narzędzia diagnostyczne. Wśród najnowszych rozwiązań pojawiają się kamery wielospektralne zintegrowane z bezzałogowymi statkami powietrznymi, które dostarczają wielu ważnych z punktu widzenia efektywności produkcji rolnej informacji. Systemy te posiadają liczne zalety, mają niewielkie rozmiary, mały ciężar < 4 kg, są bezpieczne i wygodne w transporcie, mogą być rozmieszczone szybko i wielokrotnie w tym samych miejscach, są trwałe i odporne na uszkodzenia nawet w przypadku częstego ich użytkowania. W trakcie jednej misji mogą zgromadzić dane z obszaru około 50 ha (120 m AGL). Aplikacje do planowania misji są intuicyjne i proste w obsłudze, natomiast zdjęcia w rozdzielczości 2,08MP wspomagane technologią RTK/RTN gwarantują precyzyjne odwzorowanie powierzchni szaty roślinnej.
2. Lokalizacja obiektu
Tereny rolne wzdłuż drogi gminnej klasy lokalnej (ul. Królewska) pomiędzy miejscowościami Bibice oraz Wola Zachariaszowska. Współrzędne narożników: NW 50,13496992, 19,94007331; SE 50,13390945, 19,94611779, wysokość bezwzględna 327 m n.p.m (CS2000 Strefa 7). Gospodarstwa rolne o jednorodnej strukturze zagospodarowania, kukurydza na ziarno, odmiana średnio-późna. Wstępna analiza efektywności plonowania.


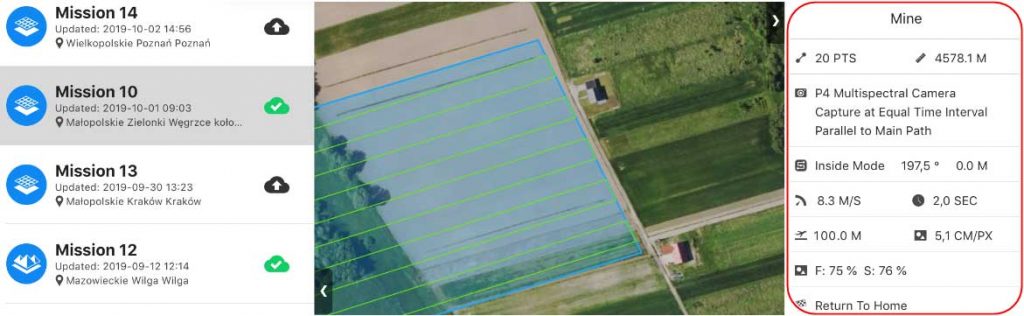
3. Przebieg misji
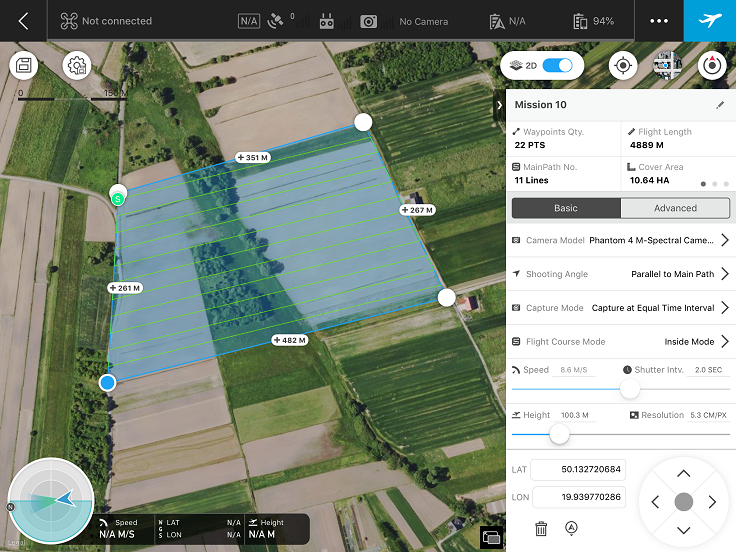
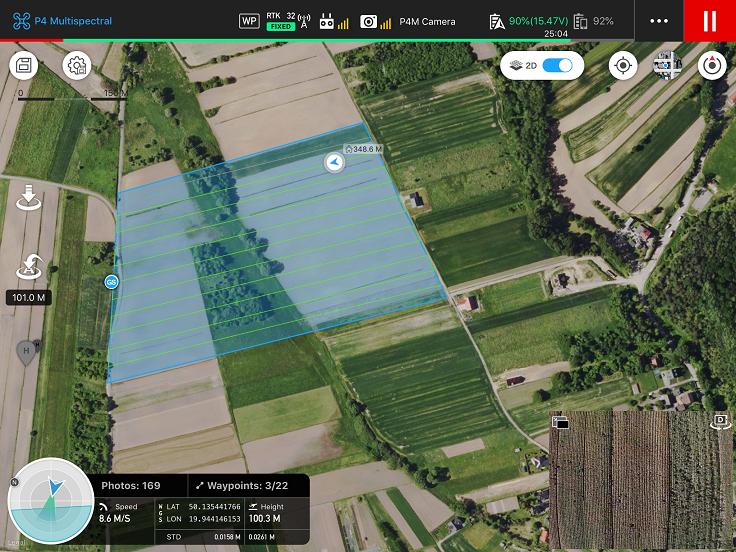
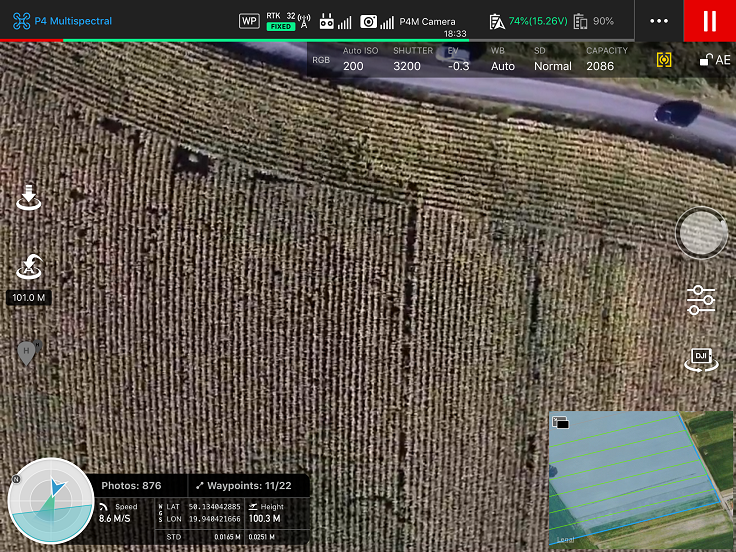
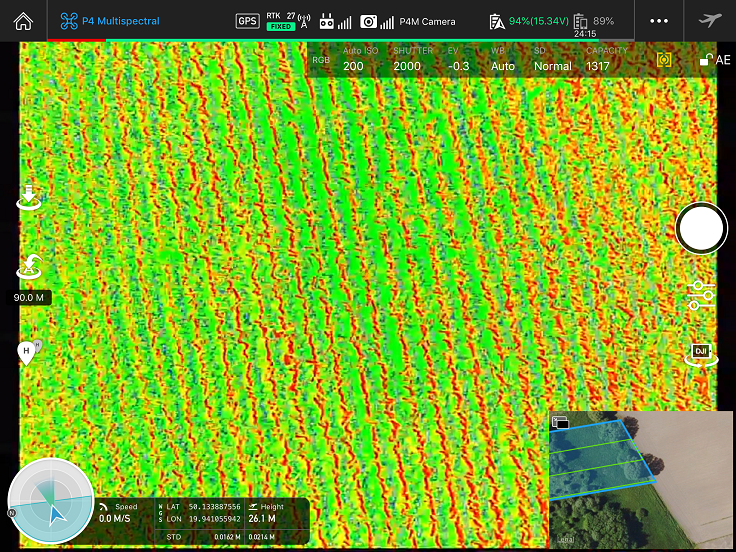
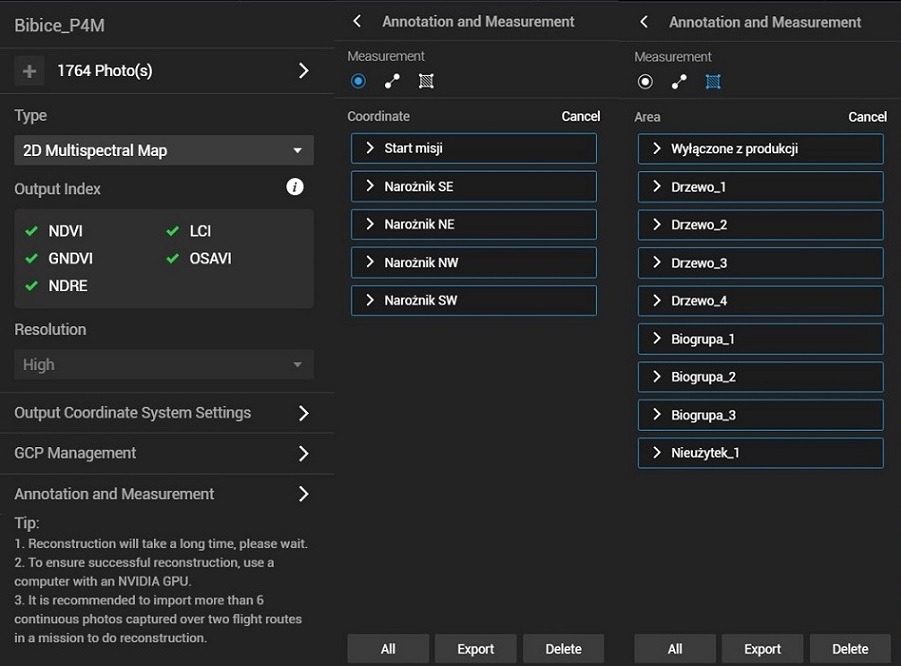
Misję statku bezzałogowego przygotowano w aplikacji DJI GPS (Ground Station Pro) 2.0.7 zainstalowanej na urządzeniu IPad Mini iOs. Trasa została wyznaczona zgodnie z następującymi parametrami: obszar nalotu 11,8 ha, wysokość lotu 100 m AGL, prędkość pozioma 5,6 m·s-1, stabilizacja RTK/RTN (BS/A 20/27), FO/SO 75%/75%. Zapis zdjęć z sensorów odbywał się bezpośrednio na karcie MicroSD umieszczonej na pokładzie statku. Ustawienia kamery: CO Landscape; GSD 5,28.. Warunki meteorologiczne w trakcie misji: słonecznie, temperatura powietrza 22ᶹC; wilgotność powietrza 75%; zachmurzenie ogólne nieba 0,5 Okt, prędkość wiatru 4,8 m·s-1, widoczność CAVOK; stan powierzchni czynnej upraw: sucha. W trakcie misji wykonano 1764 zdjęcia (5 kanałów DJI MSC + RGB) w formacie TIFF/JPG (16 bit).
4. Opracowanie danych
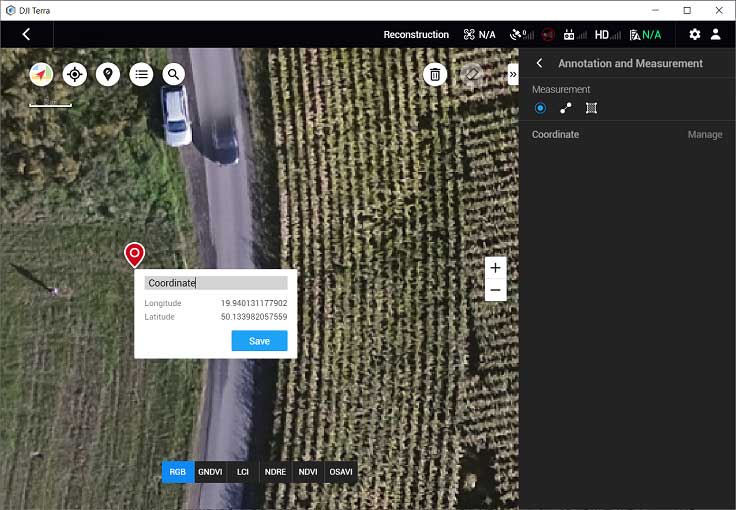
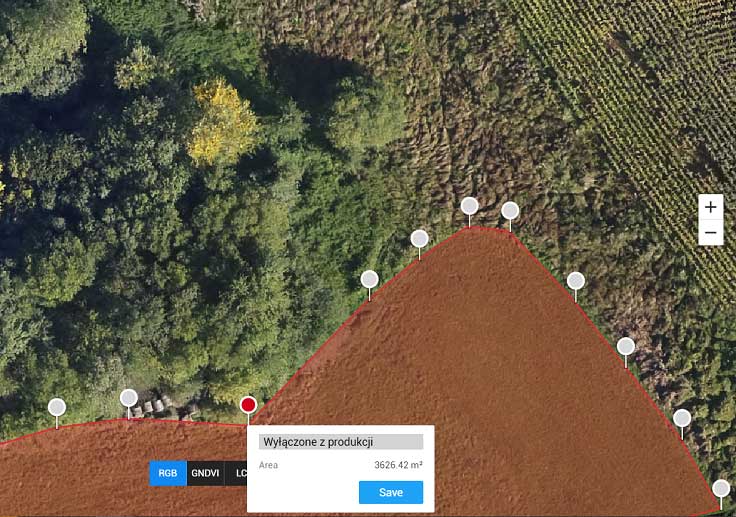
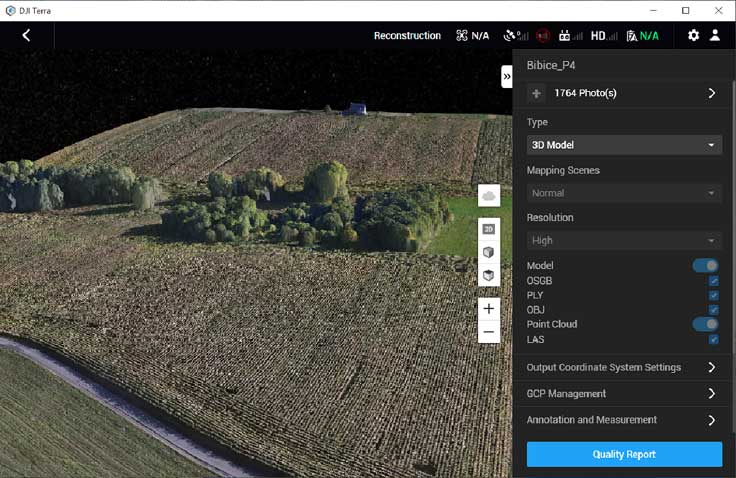
Opracowanie wykonano na komputerze DELL Vostro P71F w aplikacji DJI Terra wersja 2.1.1. Średnia wartość wskaźnika EIQ dla zdjęć wykonanych kamerą multispektralną wyniosła 0,898 (±0,021); liczba zdjęć wyrównanych 1764/1764 (100%); średnia liczba punktów wiążących 5894; całkowity czas przetwarzania 25 min (High Resolution). Produkt końcowy mozaika barwna NDVI, GNDVI, NDRE, LCI oraz mapa RGB. Pomiary planimetryczne obiektów roślinnych wykonano na podkładzie RGB (orotofomozaika) w module Annotation and Measurement programu DJI Terra i wyeksportowano do pliku w formacie JSON.
5. Wstępna ocena sprzętu i oprogramowania
Oferowane przez firmę DJI rozwiązanie jest nowatorskie, a zarazem uniwersalne. Na szczególną uwagę zasługuje zintegrowana z platformą latającą kamera złożona z 5 czujników spektralnych B/G/R/RedEdge/NIR oraz osobnego sensora RGB. Całość w estetycznej poliwęglanowej odpornej na uszkodzenia mechaniczne osłonie. Kamera zamocowana na trójosiowym gimbalu pozwala na wykonywanie zdjęć w różnych konfiguracjach zarówno w trybie autonomicznym jak i ręcznym. Jest to pierwsza kamera wielospektralna z możliwością konfiguracji rożnokątowej, szczególnie przydatna do monitorowania ściany lasu i granic środowiskowych o zróżnicowanej strukturze. Platforma Phantom 4 Multispectral posiada możliwość lotu w zablokowanym „headingu” z automatyczną korektą pochylenia gimbala, co daje zysk około 10% czasu operacji. Misje w trybie przestankowym i ciągłym z optymalizacją prędkości lotu poziomego między poszczególnymi ekspozycjami stanowią dodatkowy atut. Piksel terenowy dla sensora RGB 5,7 pix/cm (120 AGL), dla sensorów spektralnych 8,5 pix/cm (120 m AGL) daje gwarancję bardzo dobrej jakości opracowania.
Aplikacja DJI Ground Station Pro w wersji 2018.11 pozwala operatorowi w łatwy sposób zaplanować misję, określić zasięg przestrzenny operacji lotniczych, szczegółowo skonfigurować lot nad zadanym obszarem. Panel konfiguracyjny jest stale otwarty, co daje możliwość nadzorowania misji i jej modyfikacji nawet w trakcie lotu. Czytelny interfejs pozwala na podgląd na żywo aktualnych współrzędnych statku, danych telemetrycznych, obrazu z sensora RGB oraz obrazu w konfiguracji NDVI (NIR-RED)/(NIR+RED). Misja autonomiczna realizowana jest od startu do lądowania w trybie FailSafe. Po wylądowaniu statku aplikacja wyświetla zwięzły komunikat o parametrach zakończonego lotu (dystans, pokrycie, heading, czas). Po zakończeniu misji operator może wykonać mapę 2D bez konieczności przenoszenia zdjęć do programu fotogrametrycznego. Pobieranie obrazu odbywa się płynnie w oknie nawigacji projektu „PhotoMap”; o szybkości tworzenia kompozycji decyduje rozdzielczość (do wyboru: wysoka, średnia i niska). Ponadto, moduł „PhotoMap” posiada możliwość kalibracji mapy 2D przez ręczne dodawanie punktów kontrolnych i wyświetlanie „offsetu” RP/CP.
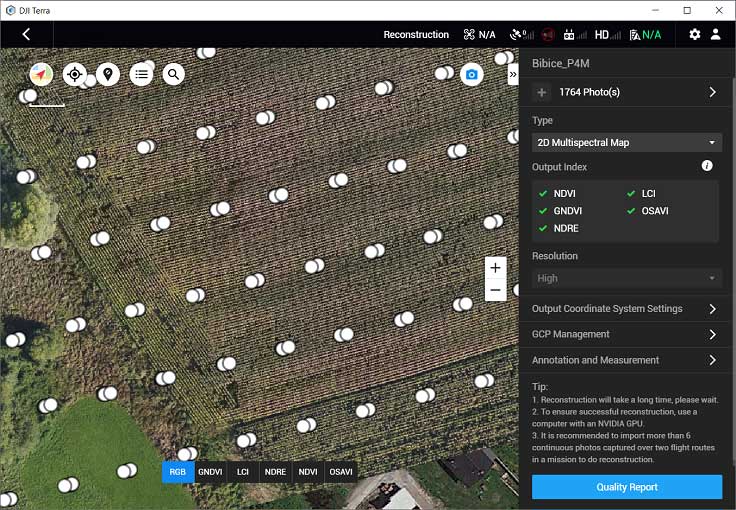
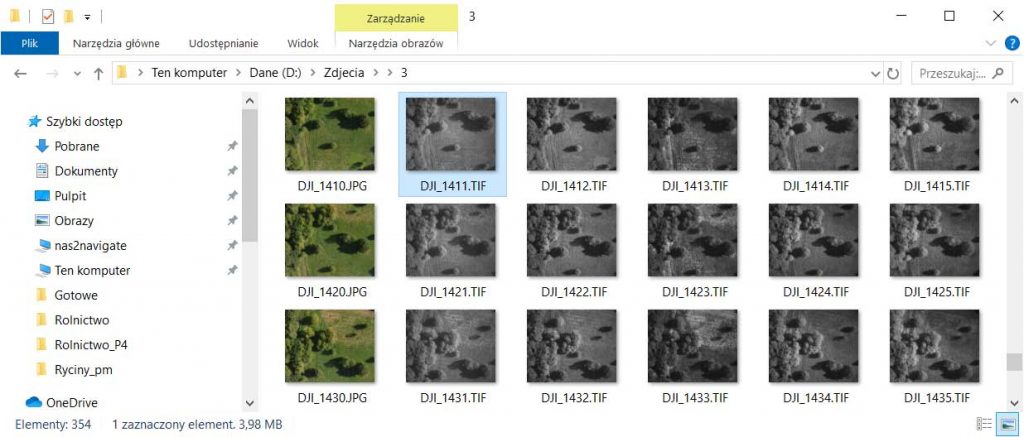
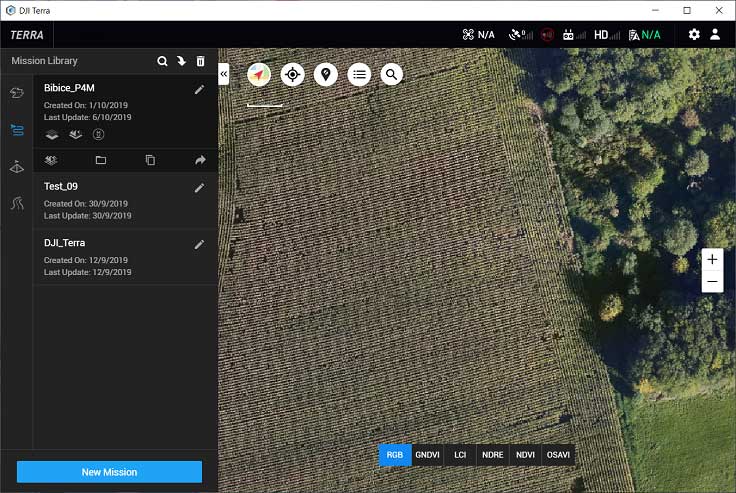
Program DJI Terra oferuje wygodny w użyciu interfejs złożony z okna głównego – prezentacja wyników obliczeń, biblioteki projektów – po lewej stronie okna, oraz panelu konfiguracyjnego – po prawej stronie. W zakładce „Projekt” użytkownik ma do dyspozycji trzy warianty analizy: 2DMap, 3DModel oraz 2DMultispectral Map. Dzięki kamerze zamontowanej na platformie Phantom 4 RTK w wersji Multispectral w trakcie jednej misji gromadzi zestaw 6 zdjęć tj. 1 zdjęcie z sensora RGB (~1,00 Mb) oraz pięć kolejnych B/G/R/RedEdge/NIR z sensorów spektralnych (4,0 Mb/kanał). Tak przygotowane repozytorium pozwala na wykonanie kompletnego projektu w powyższych wariantach. W trakcie analizy program tworzy logiczny zestaw folderów wraz z katalogami zawierającymi wyniki obliczeń oraz gotowe mapy reflektancji, mapy indeksów wegetacyjnych, modele oraz chmurę punków. Na zakończenie autorzy otrzymują gotowy raport w formacie „pdf” zawierający następujące dane: materiał zdjęciowy, status RTK, kalibracja kamery, dane o sprzęcie, informacje o eksportowanych plikach, rycina w postaci barwnej ortomozaiki oraz rycina modelu DSM wraz z legendą. Funkcja eksportu pozwala na zapisywania wyników opracowania w następujących formatach: JSON, LAS, OBJ, OSGB, PLY, PNTS, GeoTIFF, PNG.

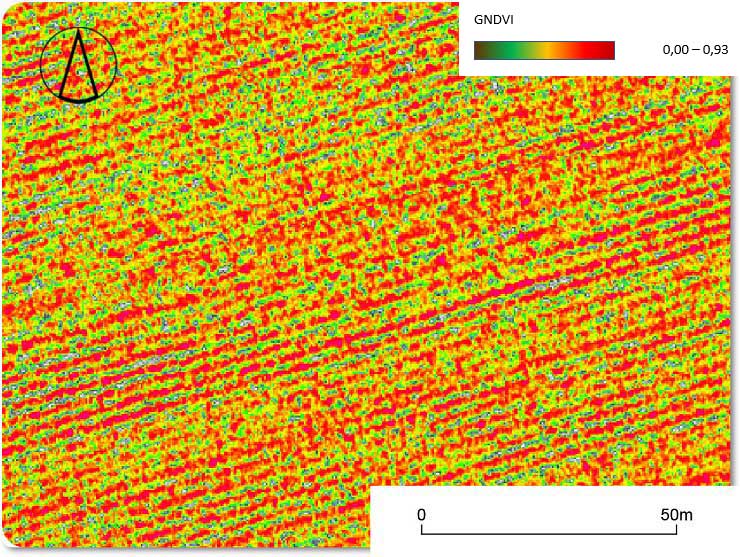
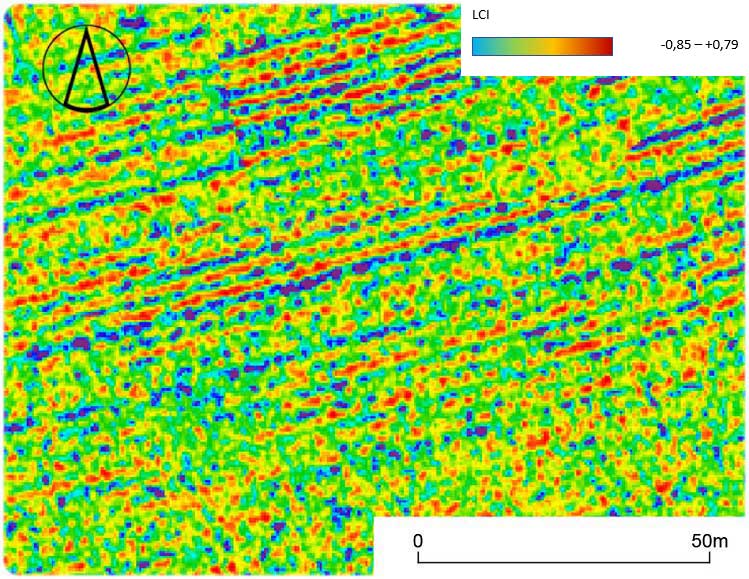
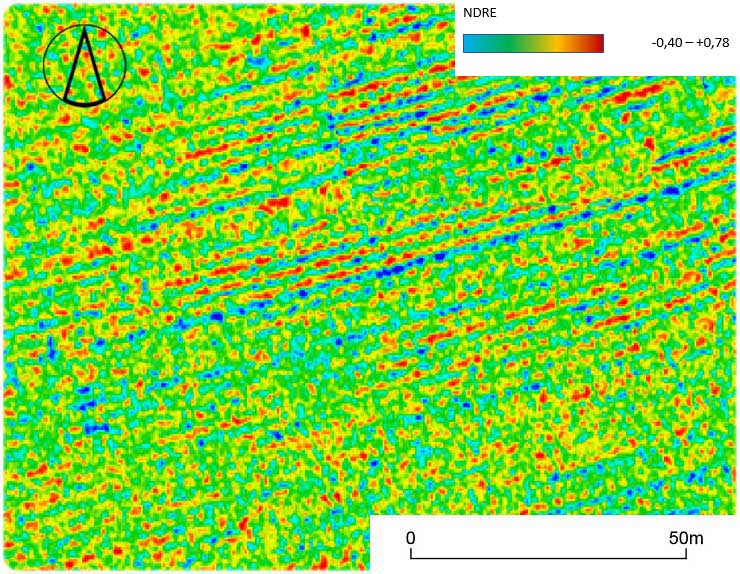
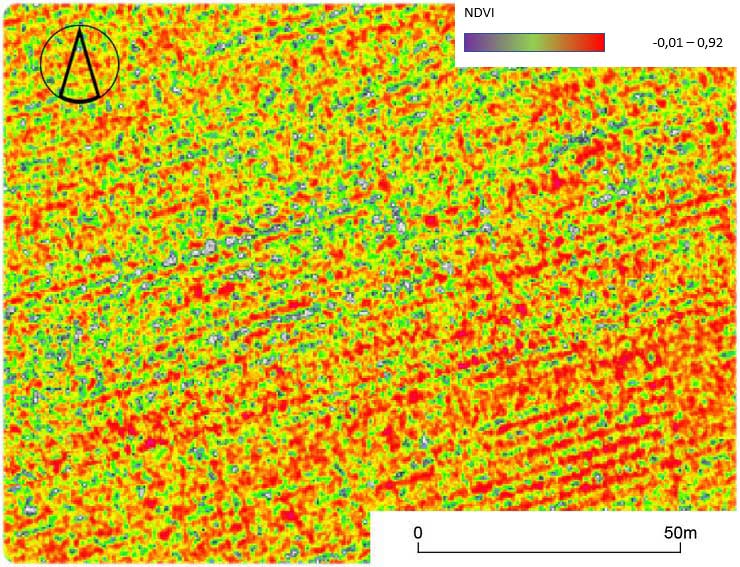
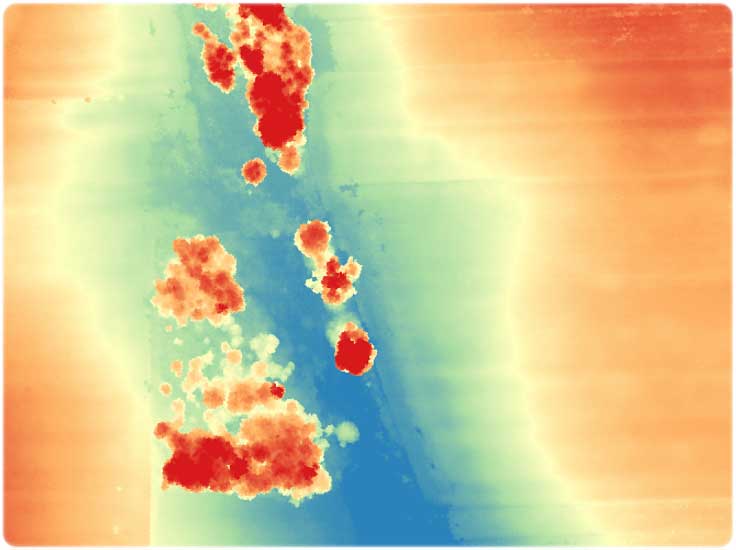
6. Wyniki analizy upraw
Stan zdrowotny uprawy kukurydzy w obrębie gospodarstwa rolnego był dobry choć wyraźnie zróżnicowany ze względu na odmienny termin siewu (różnice do dwóch tygodni) oraz sposób nawożenia. W terminie wykonania misji 100% uprawy znajdowało się w końcowej fazie dojrzewania po wypełnieniu kolby, liście zielone oraz częściowo przebarwione (jesienna synteza pigmentów). Różnice wartości wskaźników wynikają również z położenia uprawy w terenie. Nieco wyższe zanotowano na ekspozycji południowo-zachodniej aniżeli na północno-wschodniej doliny. Jeśli zaś chodzi o kierunek siewu, to wyższe wartości indeksów wegetacyjnych (NDVI, NDRE) obejmowały fragmenty uprawy wysianej na kierunku N-S aniżeli W-E. Różnice dochodziły do 10%. Szacowany zbiór ziarna na poziomie 210-220 dt/ha (ziarno mokre). W przypadku kiszonki szacowany zbiór na poziomie 520-530 dt/ha (późna faza dojrzewania). W strukturze użytkowania ziemi gospodarstwa rolnego w Bibicach dominuje uprawa kukurydzy tj. 82,5%, następnie 5% to nieużytki oraz 3,1% `tereny wyłączone z produkcji. Zadrzewienia złożone z gatunków liściastych typowych dla siedlisk wilgotnych stanowią 9,3% i zajmują tereny wzdłuż potoku Bibiczanka.
| Nazwa | Typ roślinności | Powierzchnia | Jednostka |
| Kukurydza | Zboże na ziarno | 97424,2 | m2 |
| Wyłączone z produkcji | Łąka | 3626,42 | m2 |
| Drzewo_1 | Wb | 321,01 | m2 |
| Drzewo_2 | Wb | 415,59 | m2 |
| Drzewo_3 | Wb | 246,44 | m2 |
| Drzewo_4 | Wb | 110,83 | m2 |
| Biogrupa drzew_1 | Wz, Ol, Js, Db, Wb | 2077,3 | m2 |
| Biogrupa drzew_2 | Wb, Ol, Wz | 363,96 | m2 |
| Biogrupa drzew_3 | Wz, Ol, Js, Db, Wb | 7471,11 | m2 |
| Nieużytek_1 | Trawy, zioła | 3992,11 | m2 |
| Nieużytek_2 | Trawy, zioła | 3992,11 | m2 |
| Nieużytek_1 | Trawy, krzewy, zioła | 1200,25 | m2 |
| Nieużytek_3 | Trawy, krzewy | 750,87 | m2 |
7. Podsumowanie
Opisana w materiale technologia UAV/UAS wraz z narzędziami do cyfrowego przetwarzania obrazu stanowi wydajne narzędzie wspierające diagnostykę upraw rolnych. Wprawdzie rozdzielczość kamery FC6360 firmy DJI jest wyraźnie niższa od tej jaką znajdziemy w kamerach oferowanych przez liderów rynku zobrazowań multispektralnych, jednak łatwość jej obsługi, możliwości konfiguracji różnokątowej i współpraca z czujnikiem natężenia promieniowania słonecznego zamontowanego na platformie to z pewnością wyróżnia prezentowane rozwiązanie. Zaletą aplikacji GS Pro (system iOS) do planowania i nadzorowania misji jest podgląd wskaźnika NDVI na żywo, podobnie jak podgląd na żywo obrazu rejestrowanego w każdym z kanałów spektralnych z osobna. W porównaniu z aplikacją DJI Pilot (system Android) opisane wyżej narzędzie wydaje się lepsze i bardziej funkcjonalne. Inżynierowie firmy DJI nie przestają zaskakiwać swoich klientów, tym razem ofertę kierują do wymagających rolników oczekujących precyzyjnego a jednocześnie wygodnego i łatwego w obsłudze narzędzia.
Źródła:
- Candiago S., Remondino F., De Gilio M., Dubbini M., Gatelli M. 2015. Evaluating Multispectral Images and Vegetation Indices for Precision Farming Applications from UAV Images. Remote sensing, 7 (4) 4026-4047. https://doi.org/10.3390/rs70404026
- Civil Aviation Authority (CAA) 2017. Small Unmanned Aircraft (SUA) operators holding a valid CAA permission. http://publicapps.caa.co.uk/docs/33/20170714RptUAVcurrent.pdf
- Gago J, Douthe C., Coopman C.E., Gallego P.P., Ribas-Carbo M., Flexas J., Escalona J., Medrano H. 2015. UAVs challenge to assess water stress for austainable agriculture. Agricultural Water Management 153,(1), 9-19.
- Dandois J.P., Olano M., Ellis E.C. 2015. Optimal Altitude, Overlap, and Weather Conditions for Computer Vision UAV Estimates of Forest Structure. Remot. Sens. 7: 13895-13920. Doi:10.3390/rs71013895
- Hunt E., Rock B. 1989. Detection of changes in leaf water content using Near- and middle-Infrared reflectances. Remote Sensing of Environment 30, 43-54.
- Ceccato P., 2001. Detecting vegetation leaf water content using reflectance in the optical domain. Remote Sensing of Environment 77, 22-33.