Po upływie prawie roku od premiery pierwszego systemu LiDAR firmy DJI Enterprise, czyli sensora DJI Zenmuse L1 oraz po wykonaniu wielu wdrożeń i nalotów z naszymi klientami chcielibyśmy podzielić się wrażeniami na temat możliwości sensora, udowadniając, że skanowanie laserowe z drona może być dostępne praktycznie dla każdego.
Czym jest technologia LiDAR?
Skaning laserowy jest znany także pod nazwą LiDAR (ang. Light Detection and Ranging). W przeciwieństwie do fotogrametrii zalicza się do aktywnych technik teledetekcyjnych pozwalających na bezkontaktowy pomiar badanego obiektu poprzez wykorzystanie promieniowania elektromagnetycznego emitowanego i odbieranego przez skaner. Dzięki czemu możemy wykorzystać sensor również w nocy. Technologia opiera się w głównej mierze na pomiarze odległości punktu od urządzenia oraz kierunku wysyłania promienia laserowego, z których następnie wyznaczane są współrzędne przestrzenne 3D (X, Y, Z) punktu.
W przeciwieństwie do standardowych naziemnych skanerów laserowych, systemy LiDAR wykorzystywane w lotniczym skaningu (czy też tym „dronowym”) wyposażone są dodatkowo zarówno w odbiornik GNSS, służący do wyznaczenia pozycji (X, Y, Z) skanera, jak i precyzyjną jednostkę inercyjną IMU obliczającą przyśpieszenie oraz kąty obrotu w trzech płaszczyznach (X,Y,Z). Dzięki temu, użytkownik otrzymuje jednolitą chmurę punktów 3D wraz z georeferencją.
LiDAR a fotogrametria
Pierwszą różnicą między fotogrametrią a technologią LiDAR są dane, jakie uzyskujemy po zakończeniu misji. W przypadku fotogrametrii są to surowe pojedyncze zdjęcia, które dopiero po przeprowadzeniu kilku czasochłonnych procesów w specjalistycznym oprogramowaniu przekształcają się w gęstą chmurę punktów. Jeśli chodzi o technologię LiDAR to po wczytaniu danych ze skanera do dedykowanego oprogramowania użytkownik od razu otrzymuje wysokorozdzielczą chmurę punktów, przyśpieszając proces pozyskiwania danych 3D o co najmniej o 100%.
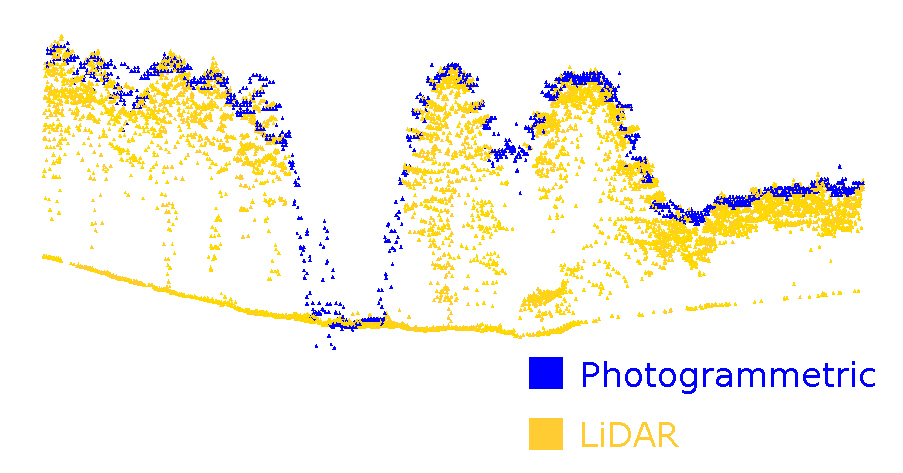
Kolejną cechą odróżniającą system LiDAR od fotogrametrii jest możliwość rejestracji kolejnych odbić (ech) sygnałów, dzięki czemu możliwe jest penetrowanie roślinności w celu otrzymania informacji o jej strukturze oraz o ukształtowaniu terenu, podczas gdy za pomocą kamery RGB uzyskalibyśmy najprawdopodobniej tylko informację na temat kształtu górnej warstwy koron drzew (ryc. 1, 2).
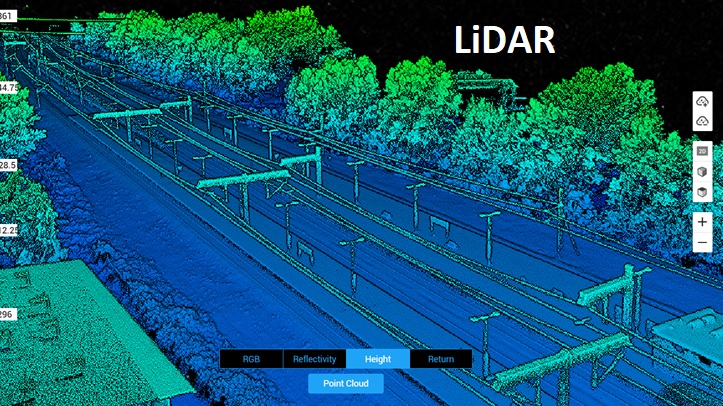
LiDAR jako aktywna technika teledetekcyjna (emituje własną wiązkę lasera) oprócz mniejszych ograniczeń związanych z oświetleniem jest w stanie również wykryć obiekty np. linie energetyczne, linie teletechniczne, kable napowietrznej sieci internet, których za pomocą metod fotogrametrycznych nie bylibyśmy w stanie odwzorować (ryc. 3).
DJI Zenmuse L1 – gotowe rozwiązanie LiDAR
DJI Zenmuse L1 to zintegrowane rozwiązanie składające się z głowicy skanującej LiDAR Livox Avia, wysoko precyzyjnego IMU oraz 1-calowej kamery CMOS z mechaniczną migawką znanej z bestsellerowego Phantoma 4 RTK. Całość znajduje się na 3-osiowym gimbalu, co gwarantuje stabilność urządzenia na pokładzie bezzałogowego statku powietrznego. W przeciwieństwie do innych dostępnych na rynku skanerów, DJI Zenmuse L1 umożliwia również skanowanie pod innym kątem niż -90 stopni, który może być definiowany dowolnie przez użytkownika. Dzięki temu możemy skanować obiekty pionowe takie jak np. elewacja budynków, maszty czy wieże BTS.
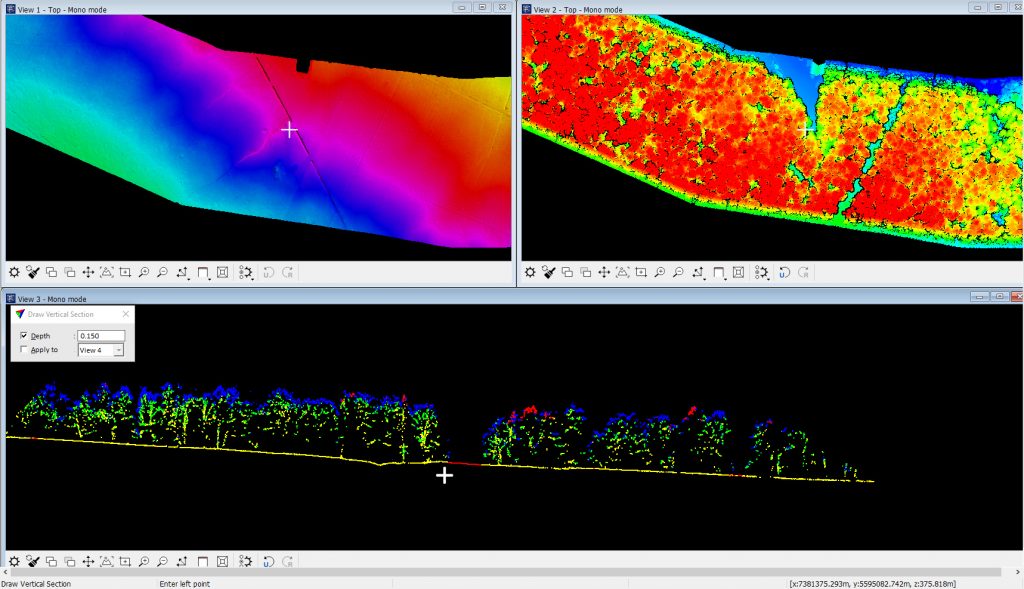
Sensor skanujący Livox Avia zastosowany w DJI Zenmuse L1 dzięki prędkości skanowania 240 000 pkt/s oraz możliwości rejestracji aż 3 odbić gwarantuje nam odpowiednią gęstość chmury punktów również pod koronami drzew. Dodatkowo sensor został wyposażony w dwa tryby skanowania. Pierwszy z nich ”non-repetitive” umożliwia skanowanie praktycznie z takim samym polem widzenia (70.4° x 77.2°) zarówno prostopadle jak i równolegle do kierunku lotu, dzięki czemu jesteśmy w stanie (np. dla terenów zurbanizowanych) uzyskać informację na temat elewacji budynków bez wykonywania nalotów krzyżowych. Drugi natomiast, ”repetitive”, posiada mniejsze pole widzenia wzdłuż kierunku lotu (70.4° x 4,5°) przez co skanowaniu podlegają tylko elewacje budynków równoległe do kierunku lotu. Jednakże tryb ten charakteryzuje się lepszą penetracją roślinności oraz wyższą dokładnością (ryc. 4).
Pełna kompatybilność DJI Zenmuse L1 z dronem DJI Matrice 300 RTK i aplikacją DJI Pilot
Sensor DJI Zenmuse L1 jest w pełni kompatybilny z dronem Matrice 300 RTK oraz aplikacją DJI Pilot. Dzięki temu w prosty sposób jesteśmy w stanie zaplanować wszystkie standardowe parametry misji, oraz ustawić parametry skanera i kamery RGB. Co ważniejsze, DJI Zenmuse L1 wykorzystuje także anteny GNSS RTK Matrice 300 RTK. Dzięki temu użytkownik nie musi stosować zewnętrznej stacji referencyjnej (DJI D-RTK2 lub innego odbiornika generującego dane w formacie RINEX) zainstalowanego na punkcie o znanych współrzędnych. W tym przypadku wystarczy jedynie połączenie internetowe wraz z dostępem do serwisu danych korekcyjnych np. ASG-EUPOS RTK lub RTN, co upraszcza procedurę prac terenowych w szczególności podczas długich misji liniowych.
Ponadto poprawna kalibracja jednostki inercyjnej IMU, którą należy wykonać w przypadku systemów LiDAR również zostaje realizowana automatycznie podczas misji, dzięki czemu użytkownik nie musi wykonywać ręcznie figur kalibracyjnych. Ma także pewność, że kalibracja ważnej części systemu skanowania, jakim jest IMU, została wykonana poprawnie (ryc. 5).
Kolejną rzeczą, na którą warto zwrócić uwagę, jest możliwość wykorzystania kamery RGB nie tylko do kolorowania chmury punktów, ale również do wykonywania zwykłych misji fotogrametrycznych, gdyż aplikacja DJI Pilot posiada taką funkcję. Dzięki temu, użytkownik nie musi doposażać systemu bezzałogowego w kolejny sensor optyczny w celu wykonania np. ortofotomapy.
Oprogramowanie DJI Pilot, oprócz standardowego podglądu z kamery FPV oraz sensora RGB, pozwala na wyświetlanie chmury punktów w czasie rzeczywistym. Dzięki temu już podczas wykonywanego lotu jesteśmy w stanie przeprowadzić analizę danych pod kątem ich poprawności oraz jakości. W ten sposób uzyskujemy pewność, że każdy badany obiekt został odpowiednio zeskanowany przez co przekazywanie danych inwestorom staje się jeszcze szybsze oraz łatwiejsze (ryc. 6).
Analiza dokładności
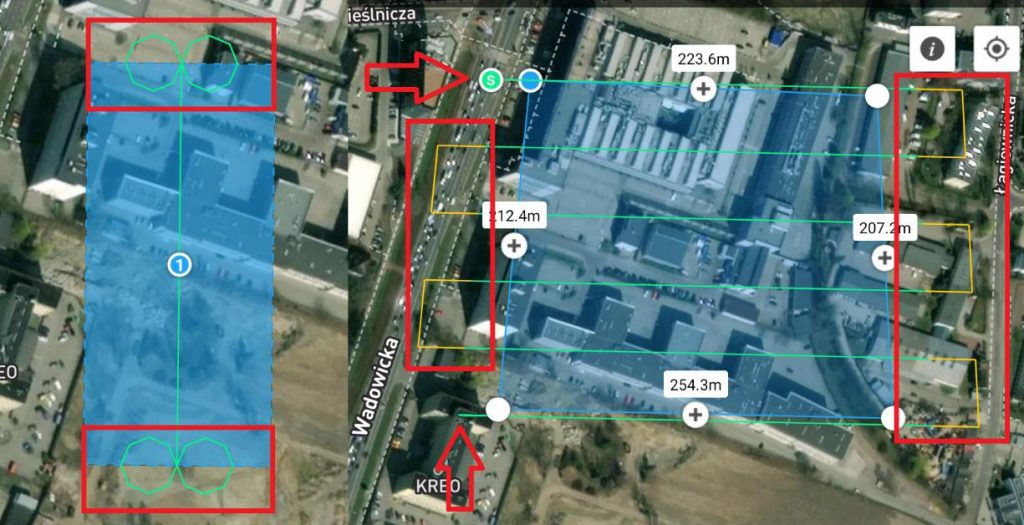
W celu sprawdzenia dokładności systemu Zenmuse L1 zaplanowaliśmy nalot nad budynkami biurowymi w centrum Krakowa na wysokości 70 m AGL z prędkością 8 m/s. Całość misji zaplanowano w aplikacji mobilnej DJI Pilot. Statek Matrice 300 RTK korzystał z danych korekcyjnych sieciowych RTN państwowego systemu ASG-EUPOS. Oprócz tego, za pomocą odbiornika naziemnego GNSS Spectra SP60 pomierzono 37 punktów, które następnie wykorzystano w trakcie analizy dokładności odwzorowania (ryc. 7).
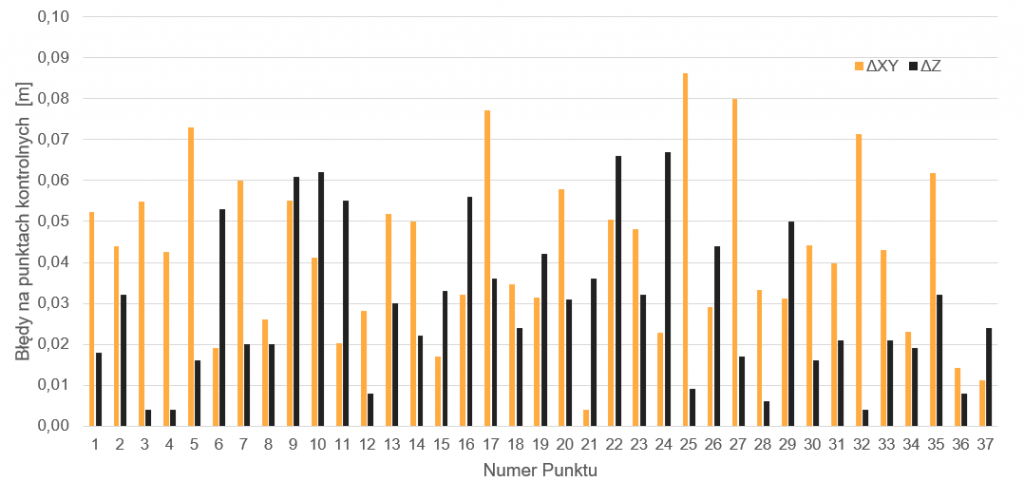
W przeciwieństwie do fotogrametrii skanowanie z bezzałogowego statku powietrznego obarczone jest większym błędem sytuacyjnym niż wysokościowym. Podczas analiz dokładności w trakcie testów z klientami możemy śmiało stwierdzić, że dokładności deklarowane przez producenta czyli 10 cm poziomo oraz 5 cm pionowo są wartościami skrajnymi. Po zaplanowaniu odpowiednich parametrów misji oraz po odpowiedniej obróbce danych pozyskanych systemem Matrice 300 RTK wraz z sensorem DJI Zenmuse L1 jesteśmy w stanie otrzymać dokładności centymetrowe, spełniające wszystkie standardy jakościowe bez stosowania jakichkolwiek punktów kontrolnych GCP (ryc. 8, tab. 1).
| Parametr | Δy [m] | Δx [m] | Δz [m] | ΔXY | ΔXYZ |
| Średnia różnica [m] | -0,01 | -0,01 | -0,02 | -0,04 | -0,06 |
| Odchylenie standardowe [m] | 0,03 | 0,03 | 0,03 | 0,02 | 0,02 |
| Zakres [m] | 0,12 | 0,13 | 0,10 | 0,08 | 0,07 |
| Minimum [m] | -0,06 | -0,07 | -0,03 | 0,00 | 0,02 |
| Maksimum [m] | 0,06 | 0,05 | 0,07 | 0,09 | 0,09 |
Podsumowanie
Po prawie roku od premiery DJI Zenmuse L1 stwierdzamy, że skaner ten wprowadził nowe standardy w skanowaniu z pokładu statku bezzałogowego i znajdzie swoje zastosowanie w wielu dziedzinach takich jak: geodezja, inżynieria budowlana, górnictwo, leśnictwo, zarządzanie przestrzenne czy architektura i archeologia. Jeszcze kilka lat temu zakup skanera wiązał się z wydaniem ogromnej sumy pieniędzy i mówiąc wprost, dla większości firm zakup taki był nieopłacalny, w szczególności biorąc pod uwagę realia polskiego rynku. Na szczęście firma DJI Enterprise, wypuszczając skaner DJI Zenmuse L1, który cenowo jest zbliżony do tradycyjnego sprzętu geodezyjnego, otworzyła drogę do skanowania z platformy UAV praktycznie dla każdego. W połączeniu z niesamowitą wydajnością statku DJI Matrice 300 RTK, który umożliwia skanowanie nawet do 2 km kwadratowych podczas jednego nalotu, możemy uzyskać dane 3D dla wielkopowierzchniowych obszarów w bardzo krótkim czasie, przyśpieszając w ten sposób zarówno prace terenowe jak i analityczne.
Specjalistyczny pakiet TerraSolid gratis dla nowych klientów DJI Zenmuse L1
Przypominamy, że dla nowych użytkowników DJI Zenmuse L1 do końca 2022 r. specjalistyczny pakiet oprogramowania firmy TerraSolid jest zupełnie za darmo! Aby skorzystać z promocji, wypełnij formularz na stronie: https://navigate.pl/dji-zenmuse-l1-matrice-300-rtk/

Rozszerz swoją wiedzę! Weź udział w szkoleniu z Systemu LiDAR na platformach bezzałogowych
Jeśli chcesz wykorzystywać lotniczy system LiDAR przy Twoich projektach, weź udział w 3-dniowym szkoleniu w formie warsztatowej z Systemu LiDAR na platformach bezzałogowych w Ośrodku Szkoleniowym NaviGate. W trakcie szkolenia poznasz możliwości pozyskania i obróbki danych 3D za pomocą sensorów LiDAR oraz specjalistycznego oprogramowania DJI Terra oraz TerraSolid.
Czego się nauczysz?
- jak przeprowadzić skanowanie laserowe z bezzałogowych statków powietrznych
- jak skonfigurować sprzęt, sensor, zaplanować misje pomiarowe i samodzielnie wykonać nalot, aby pozyskać niezbędne dane
- jak posługiwać się specjalistycznymi programami do obróbki danych LiDAR i jak wykorzystać je do późniejszej pracy zawodowej
- jak zintegrować dane z systemu LiDAR z danymi z sensorów optycznych
- jak przetwarzać dane w celu uzyskania wymaganego produktu, przeprowadzić analizę i generować raporty.
Pełny program szkolenia, cennik, a także dostępne terminy są dostępne na stronie Ośrodka Szkoleniowego NaviGate, w zakładce katalog usług – szkolenia specjalistyczne – System LiDAR na platformach bezzałogowych.